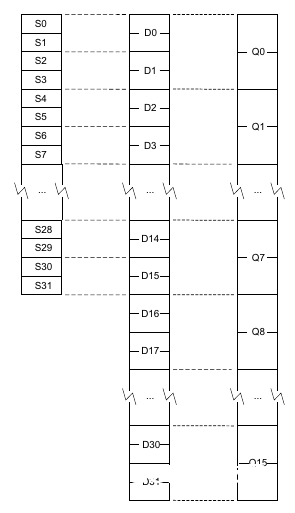
示波器用户在进行幅值/峰值等垂直量测量时,偶然遇到测量结果与预期稍有偏差,测量不够准确的问题,使用户对示波器的测量精度产生了质疑,在这里说说示波器幅值/峰值等垂直量测量为什么出现测量偏差,针对这种
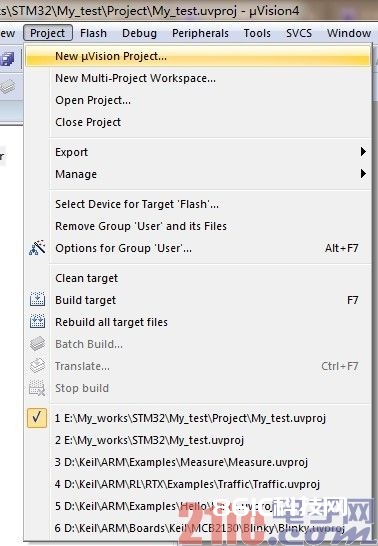
记得好早以前为了建一个keil的工程折腾了好久,在这里写写基本的Keil工程创建方法,以防自己以后再忘记:新建工程保存工程选择器件在这边新建文件夹,然后就是添加程序代码到里面去了。其中一些文件跟文件夹

项目是有关机器人控制的实现。控制部分采用PICl6F7X系列单片机,运用汇编语言编程,运行速度较快,能够达到系统的要求。在这里使用的大多是数字信号的控制,电机的控制只有开和合两种状态。在动作的过程中需
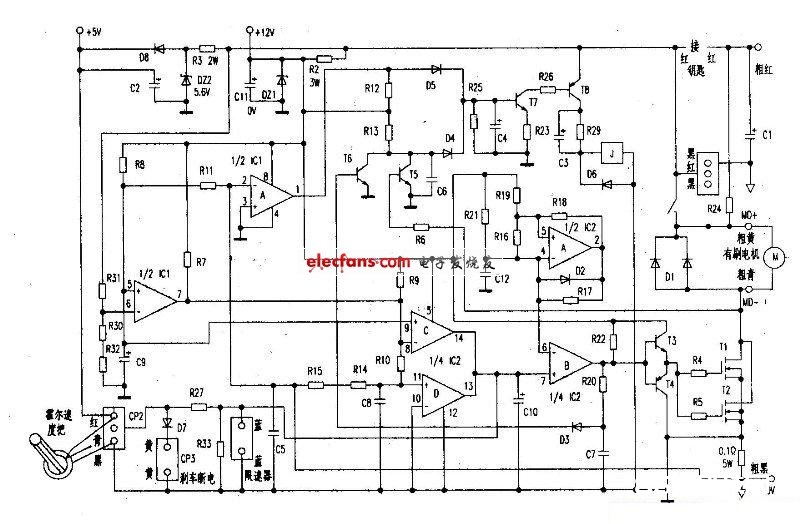
本站在这里为您整理了部分电动自行车,希望对您有所帮助!图中给出了元器件的参数等等。1、2、3、电动自行车48v-500w电路图4、奥文wml36-180g电动自行车电路图5、zkc3615mz电