



STM8单片机增量的烧写方法-1 打开STVP
2 PROJECT/NEW,乱取个名来建立项目
3 PROJECT EDITION,首先在Configuration选好芯片,最重要的就是在SerialNumbering中来设置了
勾住Enable Serial Number,输入你要选中的地址,及字节数 起始值及步进值
4设置好了以后,选择“Properties”标签,配置编程动作。
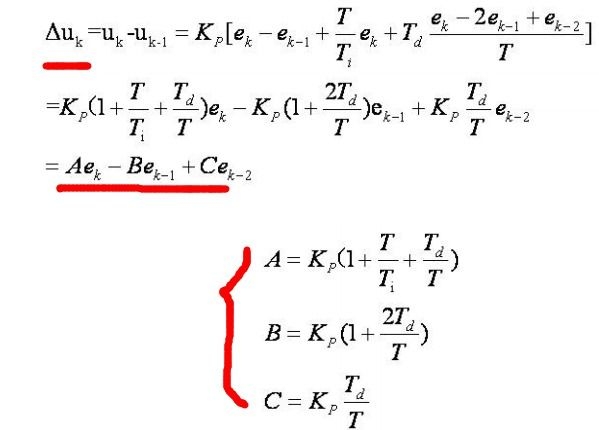
增量式PID算法的STM32实现 分析比例、积分、微分三个环节-虽然PID不是什么牛逼的东西,但是真心希望以后刚刚接触这块的人能尽快进入状态。特地分享一些自己如何实现的过程。 首先说说增量式PID的公式,这个关系到MCU算法公式的书写,实际上两个公式的写法是同一个公式变换来得,不同的是系数的差异。 资料上比较多的是: 还有一种的算法是: 这里主要介绍第二种,具体会分析比例、积分、微分三个环节的作用。 硬件部分: 控制系统的控制对象是4个空心杯直流电机,电机带光电编码器,可以反

PLC连接编码器具体有哪些方式-西门子1200的数字输入开关点均提供了增量编码器脉冲信号的快速计数器功能,单相信号达到200KHz,双相信号(可四倍频及判断方向)达到80KHz,对于常用的2500PPR(每转分辨脉冲数),转速最快达到1920RPM(每分钟转数)。
以FPGA为基础的整数分周比实现方法详细剖析-电动机是各类数控机床的重要执行部件。要实现对电动机的精确位置控制,转子的位置必须能够被精确的检测出来。光电编码器是目前最常用的检测器件。光电编码器分为增量式、绝对式和混合式。其中,增量式以其构造简单,机械寿命长,易实现高分辨率等优点,已被广泛采用。增量式光电编码器输出有A,B,Z三相信号,其中A相和B相相位相差90°,Z相是编码器的“零位”,每转只输出一个脉冲。在应用中,经常需要对A相、B相正交脉冲按照一定的比例,即分周比进行分频。分频的难点是,无论设定分周比是整数还是分数,分频后输出的A‘相,B’相脉冲仍然要保持正交或近似正交。为此提出一种基于FPGA的整数分周比实现方法。该方法逻辑结构简单,配置灵活,易于扩展,具有很高的实用价值。
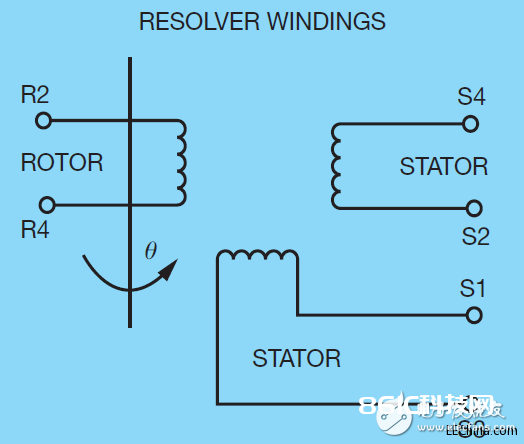
角度传感器的基本原理及如何利用其简化角度测量-编码器分为增量和绝对两个基本类别。增量编码器可以监控轮轴上的两个位置,并且可以在轮轴每次经过这两个位置时产生A或B脉冲。独立的外部电动计数器然后从这些脉冲解读出转速和旋转方向。虽然适用于众多应用,但是增量式计数器确实存在某些不足。例如,在轮轴停转情况下,增量编码器在开始运行之前必须首先通过调回到某个指定校准点来实现自身校准。另外,增量式计数器易受到电气干扰的影响,导致发送到系统的脉冲不准确,进而造成旋转计数错误。不仅如此,许多增量编码器属于光电器件 – 如果对目标应用有影响,则无法用于辐射危险区域。
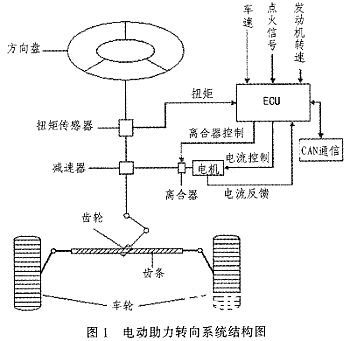
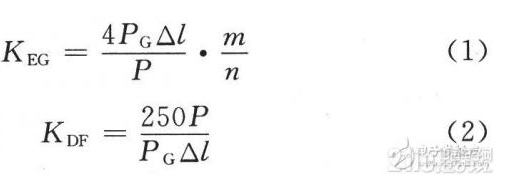
摘要:分析了电动助力转向系统(EPS)的工作原理和数学模型,建立了直线型EPS助力特性曲线和增量式闭环PID控制策略。以MC9S12DP256单片机为核心,设计了
脉冲编码调制(PCM)技术与增量调制(ΔM)技术已经在数字通信系统中得到广泛应用。当信道噪声比较小时一般用PCM,否则一般用ΔM。目前速率在155MB以下的准同步数字系列(PDH)中,国际上存在A解和

//pid.h#ifndef__PID__#define__PID__/*PID=Uk+KP*[E(k)-E(k-1)]+KI*E(k)+KD*[E(k)-2E(k-1)+E(k-2)];(增量型PI
