基于CPLD的开放式四轴运动控制器的硬件、软件设计-运动控制器是利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制。目前采用运动控制器的数控系统已成为新一代数控技术发展潮流,运动控制器将成为未来数控系统的核心。

如何在MCU内完成ADC?-ARM的特点就是方便。 这个快速采集,高性能的ADC就是一个很好的体现,12位精度,最快1uS的转换速度,通常具备2个以上独立的ADC控制器,这意味着,STM32可以同时对多个模拟量进行快速采集,这个特性不是一般的MCU具有的。

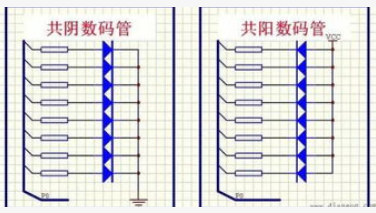
单片机MCU基础知识,初学者必看-1.MCU有串口外设的话,在加上电平转换芯片,如MAX232,SP3485就是RS232和RS485接口了。
2.RS485采用差分信号负逻辑,+2~+6V表示0,-6~-2表示1。有两线制和四线制两种接线,四线制是全双工通讯方式,两线制是半双工通讯方式。在RS485一般采用主从通讯方式,即一个主机带多个从机。
基于C51程序递归的使用方法解析-上面的函数是有错误的,可重入函数不能传递bit类型的变量。在多任务系统中,可重入函数也不要用全局变量,多个函数同时调用时可能会使变量出现多个值,但是在单任务系统中,个人认为某些时候下是可以利用的。只要不出现改变变量值的情况。


C51单片机实现多个发光二极管按照不同顺序发光的设计-MOVSCON,#00H
CLRP1.1
MOVR7,#16
MOVA,#10000000B
LOOP:MOVSBUF,A
JNBTI,$
ACALLDELAY1S
RAA
DJNZR7,LOOP
RET
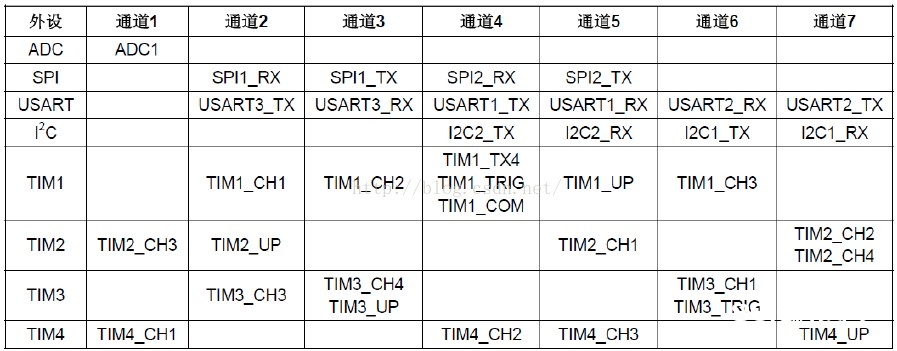
STM32单片机串口DMA解析-STM32有两个DMA控制器(DMA2只存在于大容量产品中),DMA1有7个通道,DMA2有5个通道,每个通道专门用来管理来自于一个或者多个外设对存储器的访问请求。还有一个仲裁器来协调各个DMA请求的优先权。

智能控制有源钳位反激-当我第一次开始烹饪时,我宁愿独自一人,认为厨房里的其他人会让我分心。但当我开始尝试更复杂的食谱并进行多个烹饪步骤时,我发现拥有帮手非常有用,而且烹饪体验更有趣。俗语说得好:如果你不能打败他们,加入他们。
IAR单片机编程软件的菜单栏功能及用法全面介绍-IAR软件有多个系列版本,比如MSP430、STM8等,但为了使软件在使用上“兼容”,IAR推出的多个系列软件在使用在很多地方都有相似之处,包括IAR菜单的内容。因此,本文内容也适用于IAR其他系列软件。