



怎么判断位移传感器的好坏-位移传感器的灵敏度是有方向性的。当被测量是单向量,而且对其方向性要求较高,则应选择其它方向灵敏度小的位移传感器;如果被测量是多维向量,则要求位移传感器的交叉灵敏度越小越好。
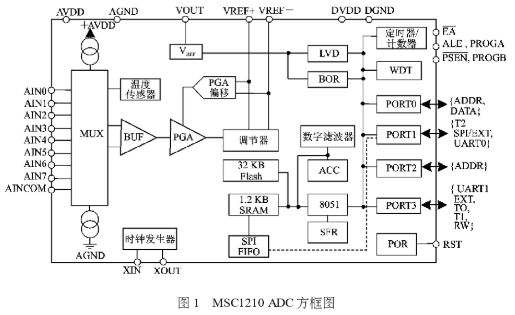
基于MSC1210单片机和多维力传感器实现对微小力和位移信息的获取-微操作已在许多应用领域得到了应用,特别是在纳微米级的定位系统中,要求传感器能检测出微小的力和位移的信息。目前用于微位移检测的原理较多,如光学式、磁和电感式、电容式和压电式等,但这些大多不便用于机器人对微小的多维力和位移信息的获取。为了将技术成熟的多维力传感器用于微力和微位移信息获取,中科院合肥智能所机器人传感器实验室在改造多维力传感器结构参数的同时,充分利用德州仪器(TI)的MSC1210单片机的许多新特性,如其自带的8路24位高精度ΣΔ A/D转换器、可编程增益放大(PGA)和滤波器等,实现了对力和位移的高精度测量。本文主要从微型机的应用角度展开探讨,希望能为提高传感器的集成化程度、分辨率、稳定性和人机交互能力作出一点贡献。
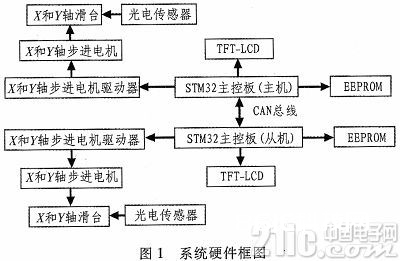
在工业控制中,往往要求多个步进电机控制多维滑台,且能同时进行多维精密控制或者单维精密控制,这样才能精确控制滑台在多维上的轨迹。本文在分析STM32产生PWM波的频率和时序以及步进电机控制原理的基础上提
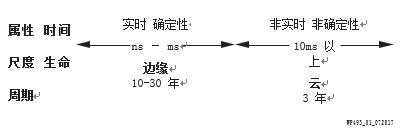
1 IT-OT 融合方法工业物联网 (IIoT) 指涉及边缘设备、云应用、传感器、算法、安全性、保密性、大量协议库、人机界面 (HMI) 及其它必须互操作元素的多维度紧密耦合的系统链。一些人将

NumPy是Python语言的一个扩展包。支持多维数组与矩阵运算,此外也针对数组运算提供大量的数学函数库。NumPy提供了与Matlab相似的功能与操作方式,因为
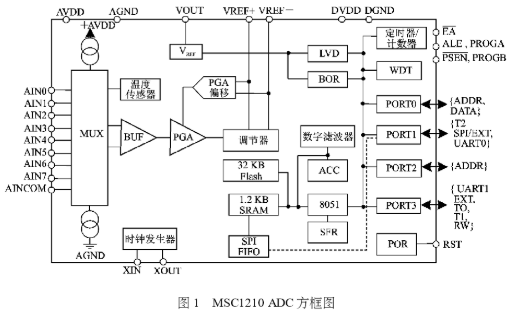
基于MSC1210单片机和多维力传感器实现对微小力和位移信息的获取-微操作已在许多应用领域得到了应用,特别是在纳微米级的定位系统中,要求传感器能检测出微小的力和位移的信息。目前用于微位移检测的原理较多,如光学式、磁和电感式、电容式和压电式等,但这些大多不便用于机器人对微小的多维力和位移信息的获取。为了将技术成熟的多维力传感器用于微力和微位移信息获取,中科院合肥智能所机器人传感器实验室在改造多维力传感器结构参数的同时,充分利用德州仪器(TI)的MSC1210单片机的许多新特性,如其自带的8路24位高精度ΣΔ A/D转换器、可编程增益放大(PGA)和滤波器等,实现了对力和位移的高精度测量。本文主要从微型机的应用角度展开探讨,希望能为提高传感器的集成化程度、分辨率、稳定性和人机交互能力作出一点贡献。

本站为您提供的多维科技推出超低功耗 TMR 磁开关传感器,5月14日,国际传感与测量测试技术展览上,多维科技推出新型TMR磁开关传感器,该传感器具有超低功耗、高频响及优异稳定性,专为电池供电的磁开关应用系统设计。

