


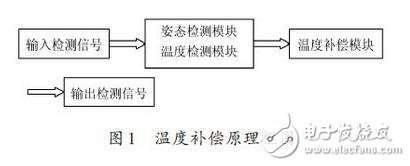
基于MEMS姿态传感器温度补偿方法-基于MEMS姿态传感器主要用于载体姿态的调整和倾角的检测,但是由于工作环境温度的改变,就会导致测量精度的变化,在一些高精度检测的要求下,则失去其检测的效果,所以必须采取相应措施来消除或者减少随温度变化而引起的误差,即必须对传感器进行温度补偿。##以参数m为因变量,温度t为自变量,根据曲线拟合式mt=at2+bt+c ,利用Matlab求出a,b,c的值,最终确定m与t的函数关系式。
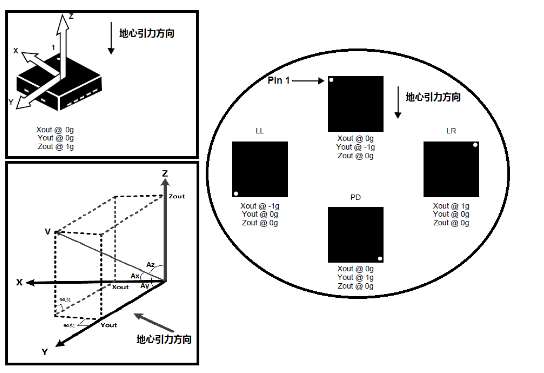
九轴传感器之加速度计是怎么回事-九轴姿态传感器,包括了加速度计、陀螺仪和磁力计,为“motion detect”提供了必需的传感数据。本篇主要讲述九轴姿态传感器中的加速度计部分。
MEMS加速度计和MEMS陀螺仪区别 常见MEMS加速度传感器介绍-最大的区别就是:工作原理和应用的区别(具体概念看下百科),前者是利用加速度,后者是利用惯性;前者是用在测斜调平,后者是知道通过知道角速率,可以知道物体的姿态,以便进行姿态控制。 两种东西通常是结合到一起应用。
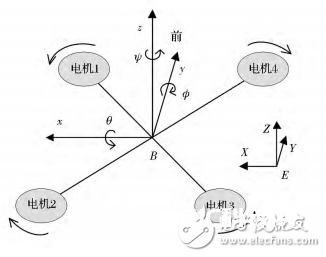
基于STM32的四旋翼飞行姿态串级控制的设计与实现-本文主要介绍了基于STM32的四旋翼飞行姿态串级控制的设计与实现,行器控制器通过处理微型MEMS惯性器件和三维地磁传感器采集的数据,计算飞行器的姿态角,并根据飞行指令,结合相应的控制律给出适当的控制信号,控制飞行器姿态和位置。能够实现飞行姿态的稳定控制,达到了设计的目的。
惯性定位如何解决陀螺仪漂移和磁场干扰问题?-针对在导航系统姿态解算中,陀螺仪和电子罗盘在解算姿态时分别存在积分误差和磁场干扰的问题,提出了利用Kalman滤波和互补滤波相融合的算法进行定位。首先将电子罗盘和陀螺仪通过Kalman滤波得出最优估计四元数,然后利用互补滤波算法对陀螺仪的漂移进行补偿得到校正后的四元数,将此次得到的四元数和Kalman滤波得出最优估计四元数再次通过Kalman滤波对四元数进行第二次最优估计,进而输出姿态角。

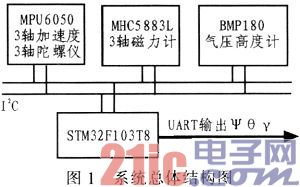
基于ARM的微型航姿参考系统设计与实现,摘要:针对微小型无人飞行器的控制需要精度高、体积小、功耗低的姿态信息模块,介绍了一种基于MEMS器件与ARM控制器的微型航向姿态参考系统(AHRS),包括三轴加
随着空间技术的快速发展,许多空间任务对航天器的姿态机动能力有更高的要求,快速、稳定、高精度的姿态控制系统成为空间技术的重要研究方向。目前用于卫星姿态机动主动控制的执行机构类型主要有推力器、反作用飞轮、
飞机的航向与姿态是飞机操纵的重要参数,航姿信号包括航向信号和姿态信号,一般把飞机的俯仰角、倾斜角、航向角、转弯角速度等称为全姿态。测量全姿态,通常采用的陀螺仪进行,也称为陀螺仪表,根据各种飞机的使用要
微机电系统(MicroElectroMechanical Systems,MEMS)陀螺仪和MEMS加速度计在两轮平衡车姿态测量中存在扰动和噪声,引起姿态角度测量误差。通过对陀螺仪和加速度计输入信号进
