


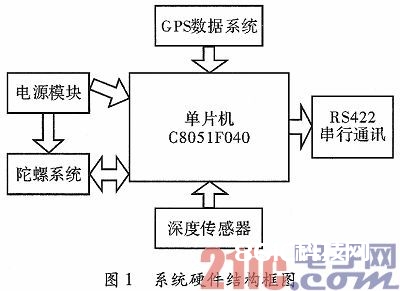
目前,水下平台支架一般与船体固连在一起而水下平台姿态的监测系统放在船上,这样会出现一个问题:监测到的平台姿态数据是否反映平台姿态真实数据。为此设计了基于C8051F040水下平台姿态监测电路,本监测电

摘要:针对气球吊篮对姿态控制的要求,本文给出以TMS320F28335为平台,开发设计出具有姿态数据采集、姿态数据处理、以及姿态实时监测功能的装置。姿态监测装置中用MEMS电子陀螺仪和地磁计获得姿态的


四轴飞行器具有不稳定,非线性特性,姿态控制为四轴飞行器控制系统的核心。机械部分搭建四个具有对称结构的螺旋桨叶和驱动电机。电气部分则采用STM32为控制核心的惯性参考模块作为姿态控制板,通过四轴飞行器的

在卫星姿态和轨道控制计算机(AOCC)分系统的设计和室内联调阶段,为方便系统调试,需设计动量轮模拟器,模拟执行机构动量轮所决定的卫星姿态和控制效果,代替真实部件进行分系统的开环和闭环试验。
设计了一种基于TMS320F2812与LabVIEW的汽车行驶姿态参数采集系统。利用ADIS16355AMLZ三轴陀螺仪灵敏度高、集成度高、测量精度高等特点,系统采用DSP对汽车行驶姿态进行实时数据采

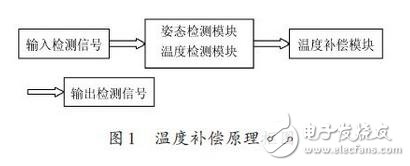
基于MEMS姿态传感器温度补偿方法-基于MEMS姿态传感器主要用于载体姿态的调整和倾角的检测,但是由于工作环境温度的改变,就会导致测量精度的变化,在一些高精度检测的要求下,则失去其检测的效果,所以必须采取相应措施来消除或者减少随温度变化而引起的误差,即必须对传感器进行温度补偿。##以参数m为因变量,温度t为自变量,根据曲线拟合式mt=at2+bt+c ,利用Matlab求出a,b,c的值,最终确定m与t的函数关系式。
