


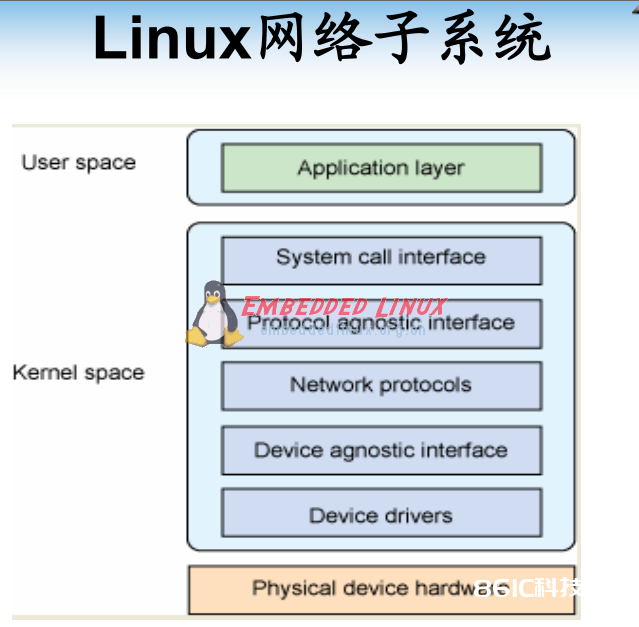
驱动之路-网络设备驱动基本原理和框架-Linux网络子系统的顶部是系统调用接口层。它为用户空间提供的应用程序提供了一种访问内核网络子系统的方法(socket)。位于其下面是一个协议无关层,它提供一种通用的方法来使用传输层协议。
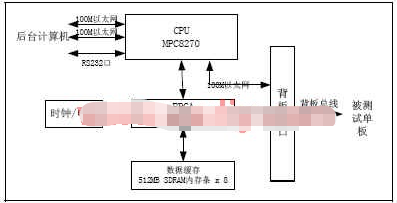
采用FPGA器件实现基站模拟测试系统的应用方案-在基站的模拟测试系统中,终端控制子系统负责生成上行测试数据并将其发送到被测基带板,测试基带板上行接收的功能及性能;同时根据后台控制采集下行发射的基带数据并送后台进行分析,测试其发射功能。而FPGA部分属于终端控制子系统的前台部分,负责IQ数据的发送及采集,基带测试板的功能主要在这里面实现。

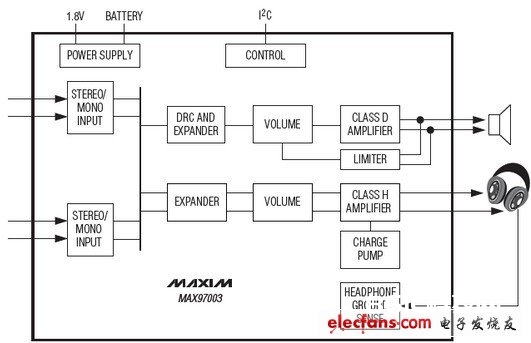
本站为您提供的MAX97003高效率H类耳机放大器的音频子系统,MAX97003音频子系统结合一个单声道扬声器放大器,立体声耳机放大器 。耳机和扬声器放大器具有独立的音量和开/关控制
本站为您提供的HMC5883L驱动及调试的总结, 因为手头有几个传感器,都需要用到I2C接口,所以在之前就将I2C子系统复习并深入研究了一番。以下我所提到的或贴出的部分代码也许不适合真正的板级驱动,因为是以模块化形式做测试的。

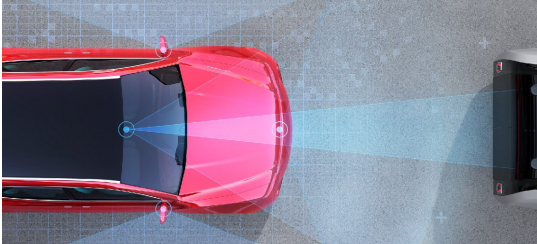
本站为您提供的基于AWR1843的77-79GHz调频连续波雷达传感器解决方案,本文介绍了AWR1843主要特性,框图,处理器子系统框图,参考电路图以及评估模块AWR1843BOOST主要特性和电路图。
