


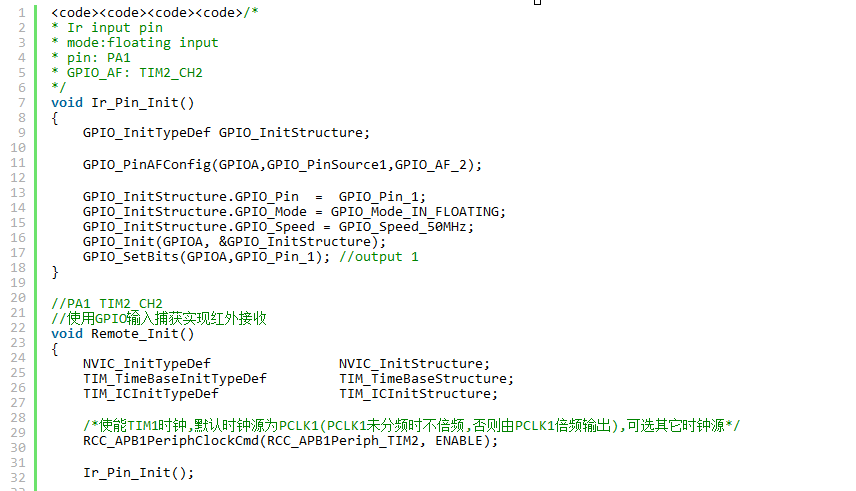
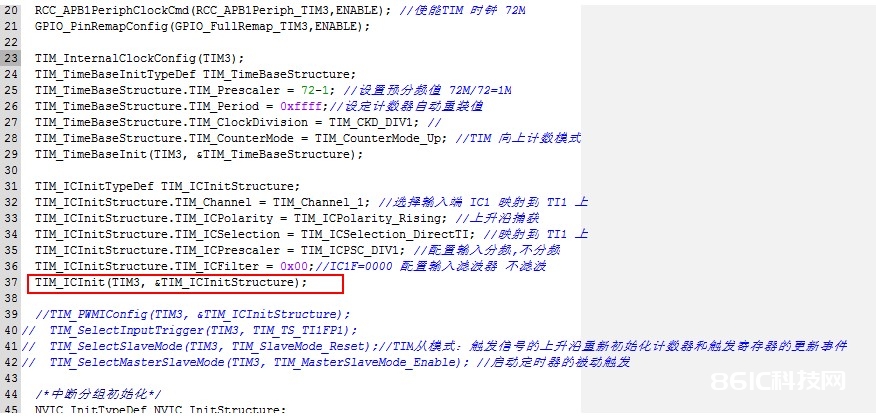
基于STM32定时器的红外遥控数据接收设计原理-定时器就是按照一个特定的频率对计数值进行加一或减一操作,当数值溢出时则产生一个标志或中断。
定时器的输入捕获就是可以测量输入信号的脉冲宽度。
本次就是通过普通计数和输入捕获的结合来实现的.

如何利用AVR单片机实现AT24C256的数据高速稳定的读取-最近刚买回一块AT24C256 EEPROM ,容量为32K Byte ,数据地址宽度为 16Bit ,支持IIC 1M (5V)400K (2.7V) 速度模式 ,利用AVR M16 片内IIC 可以高速稳定地读取数据! 经过调试的,与各位大虾分享分享。
STM32单片机的PWM输入捕获模式设计-(TIM_GetITStatus(TIM3,TIM_IT_CC1)==SET)//{ic1=TIM_GetCapture1(TIM3)+1;//周期ic2=TIM_GetCapture2(TIM3)+1;//脉冲宽度floatpulse=ic2/(float)ic1;//占空比FAN_Frequency=(u32)1000000/ic1;//频率}//TIM_SetCounter(TIM3,0);TIM_ClearFlag(TIM3,TIM_FLAG_CC1);TIM_ClearITPendingBit(TIM3,TIM_IT_CC1);//清楚TIM的中断待处理位。

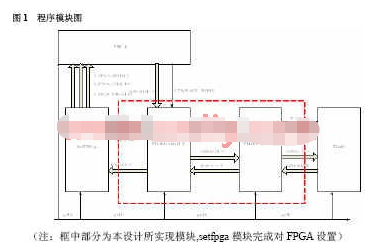
STM32单片机SPI总线与FPGA的通信设计-SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_16b; //16bit宽度
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2; //2–18MHz; 4–9MHz; 8–4.5MHz
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //高位在前
SPI_InitStructure.SPI_CRCPolynomial = 7;
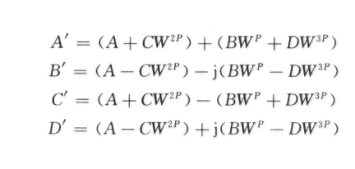
浅谈FFT算法原理 基于FPGA的FFT算法的硬件实现-在FFT算法中,数据的宽度通常都是固定的宽度。然而,在FFT的运算过程中,特别是乘法运算中,运算的结果将不可避免地带来误差。因此,为了保证结果的准确性,采用定点分析是非常必要的。
采用CPLD器件XC95288XL-7TQ144I芯片实现Flash读取控制设计-对于Flash,项目中选择了Intel公司的Intel StrataFlash系列的256-Mbit J3型Flash.其数据宽度可分别支持8位或者16位。



**********************************************315无线模块PT226215M270KHz可以测出脉冲宽度起始时间5000us高电平时间
概述ADP1974是一款恒定频率、电压模式、同步、脉冲宽度调制(PWM)控制器,用于DC-DC双向应用。 ADP1974旨在与外部高电压场效应晶体管(FET)半桥驱动器和外部控制器件(如AD8
