


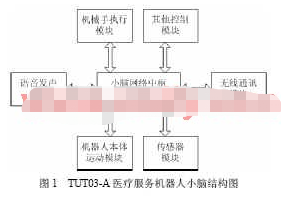
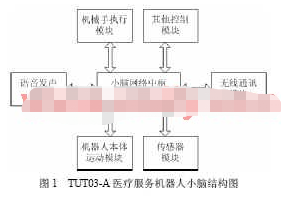
基于复杂可编程逻辑器件和MCU实现机器人小脑网络结构的实现-随着机器人各相关技术的不断发展,机器人本体功能越来越趋于模块化,机器人的核心控制部分已经逐渐从机器人本体中分离出来。以我们自行设计、开发的“TUT03-A型医疗服务机器人”为代表的基于远程脑概念[1,2]的机器人,将大脑脱离机器人本体,大脑置于母环境中,并用无线通讯与本体进行交互。
基于复杂可编程逻辑器件和MCU实现机器人小脑网络结构的实现-随着机器人各相关技术的不断发展,机器人本体功能越来越趋于模块化,机器人的核心控制部分已经逐渐从机器人本体中分离出来。以我们自行设计、开发的“TUT03-A型医疗服务机器人”为代表的基于远程脑概念[1,2]的机器人,将大脑脱离机器人本体,大脑置于母环境中,并用无线通讯与本体进行交互。
