


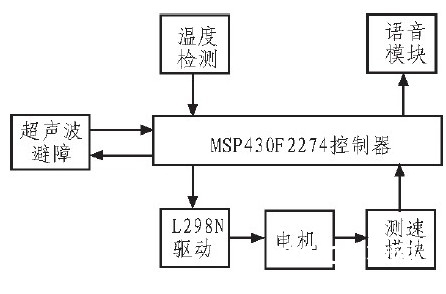
基于MSP430F2274单片机对智能小车的应用设计-该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。

52单片机对智能小车的控制设计-在小车的机械要求保证预定的功能的前提下,我们还考虑到小车的经济、可靠、外形美观,性能好、富有时代特点。
转向机构与驱动系统的设计是至关重要的。为了保证小车转向时精确、灵敏、可靠性高且在转向时小车前轮纯滚动而无滑动,利用阿克曼原理及解析算法,设计出等腰梯形的双摇杆机构,小车的完美转向变为现实。
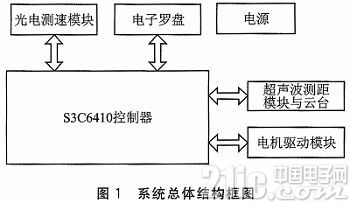
基于MSP430单片机对智能小车的控制设计-该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。采用MSP430F2274单片机作为主控制单元,小车装有超声波模块来负责探测障碍物,做出避障决策。在小车的驱动轮上装有光电编码器对小车进行测速。为消除温度对测距的影响,使用温度传感器模块时刻检测小车周围的温度情况并修正。
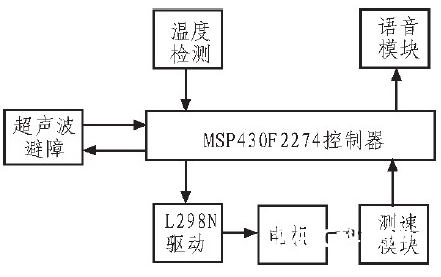
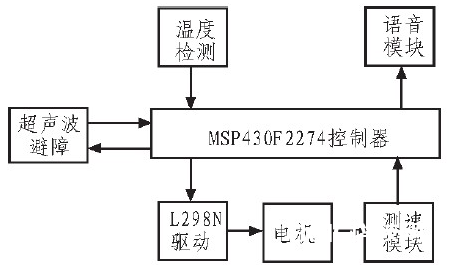
MSP430单片机对智能小车的硬件控制设计-该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。
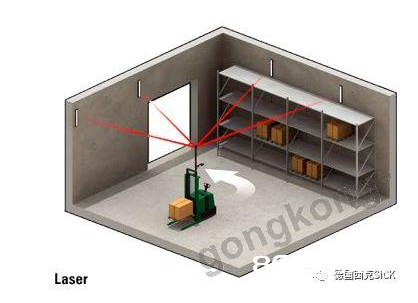
堡盟O300光电传感器在仓储物流中的应用方案解析-AGV小车能够灵活地行走在仓库中,并顺利地完成对货物的搬运,在于其可事先进行精心的设置,如何选择最合适的路线,在最适合的地方启动升降架或者机械手臂来搬运货物。而堡盟提供的O300光电传感器,则是AGV小车稳定运行中的最好保障。

ldc1000循迹小车-以LDC1000电感/数字转换器为核心,设计并制作了一个可自动根据铁丝形状循迹小车。系统的主要功能模块包括:主控模块、金属信号探测模块、速度检测模块,电机驱动模块及电源模块。系统主控芯片STC89C52根据检测到的金属距离信号,判断小车是否偏离轨道,从而做出方向调整,使小车能够在规定的平面跑道自动按一定方向自动循迹。 循轨广泛应用很于工业自动化及系统,而循迹的方式有很多种,每种都有其缺点。机械链条式轨道存在磨损占用地方;

堡盟新一代O300光电传感器在仓储物流中的应用-穿梭式AGV小车在物流仓库中的应用非常广泛,它行动灵活、稳定性高,为物流应用者带来非常大的方便,尤其在整理仓储,取货、装货时可以节省下大量的时间。AGV小车能够灵活地行走在仓库中,并顺利地完成对货物的搬运,在于其可事先进行精心的设置,如何选择最合适的路线,在最适合的地方启动升降架或者机械手臂来搬运货物。而堡盟提供的O300光电传感器,则是AGV小车稳定运行中的最好保障。

摘要:随着物流系统的迅速发展,AGV的应用范围也在不断扩展,为了满足用户功能、价格、质量方面需求的AGV系统,研究设计了一种基于电磁导航的无人驾驶小车系统方案。通过实际硬件实验,系统能够达到预期设计要
基于ARM和Linux的路径记忆循迹小车,摘要:针对智能小车在实际应用中的需要,设计了一种基于ARM和Linux的具有路径记忆循迹功能的智能小车。利用ARM和Linux操作系统,实现了对智能小车的超声
