



摘要:利用嵌入式技术和图像处理技术,设计制作了基于MC9S12XS128单片机的多功能智能小车。智能小车可以在包含岔口的路面进行自主择路行进。到达终点后,在显示屏上显示路口选择方案、行进距离、行驶时间
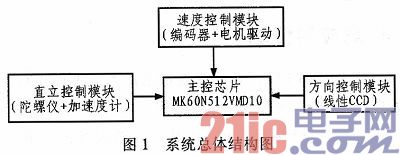
近年来,随着技术的不断进步,两轮自平衡小车以其结构简单、轻盈小巧、运动灵活、高效节能等特点,在许多个领域得到了较大的发展。本文设计并制作了一台两轮小车,用飞思卡尔公司生产的MK60DN512ZVLQ1

1 引言智能小车寻迹系统是基于摄像头和飞思卡尔16微处理器mc9s12xs128组成,由摄像头采集图像有用信息送入单片机分析道路参数。智能小车跑道表面为白色,中心有连续黑线作为引导线,黑线宽25mm,

摘要:介绍了一种采用STC89C52、L298N和TCRT5000设计的智能循迹和红外遥控的小车。智能循迹采用红外传感器检测路面信息,传递给单片机自动分析处理,最后控制电机调节小车按预定轨道平稳行驶。

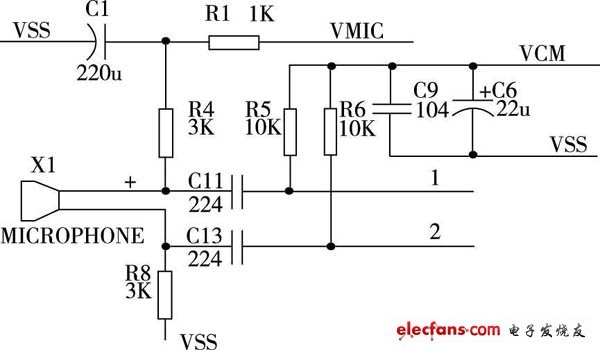
智能小车语音输入电路如图所示。其中,VMIC提供传声器的电源,VSS是系统的模拟地,VCM为参考电压,1脚和2脚分别是传声器X1的正极、负极的输入引脚。当对着传声器讲话时,1脚和2脚将随着传声器输入的
最近做51小车,期间发现,sprintf在51单片机上发生了一点小意外。出现意外的源程序如下:#includereg51.h>#includestdio.h>typedef…

51单片机wifi小车代码includeincludedefineucharunsignedchardefineuintunsignedintucharBuffer=0;从串口接收的数

因为用stm32f103c8作主控制器,来控制小车,小车的转速由两路光电编码盘输入(左右各一路)因此想到外部时钟触发模式(TIM——ETRClockMode2Co
