
舵机DS3115的组成和工作原理介绍-一般来讲,舵机主要由以下几个部分组成, 舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。 工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲),控制电机 转动 ,电机带动一系列齿轮组,减速后传动至输出舵盘。
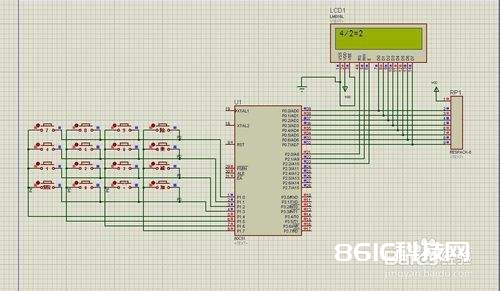
基于51单片机可修改错误功能的计算器工作原理解析-utilities.h
#ifndefUTILITIES_H_INCLUDED
#defineUTILITIES_H_INCLUDED
typedefunsignedcharuchar,BYTE,uint8;
typedefunsignedintuint,WORD,uint16;
typedefunsignedlongulong,DWORD,uint32;
typedefcharint8;
typedefintint16;
typedeflongint32;
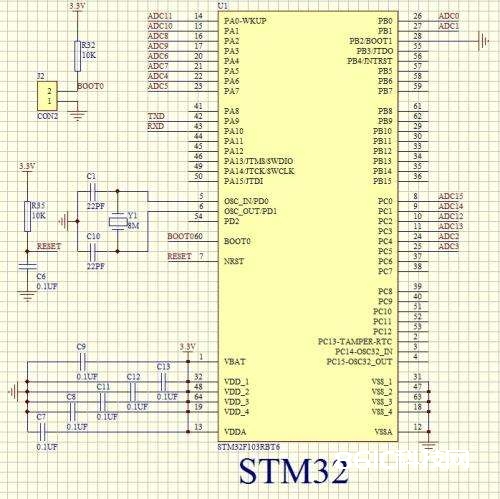
STM32F103系列单片机中的定时器工作原理解析-STM32F103系列的单片机一共有11个定时器,其中:
2个高级定时器
4个普通定时器
2个基本定时器
2个看门狗定时器
1个系统嘀嗒定时器
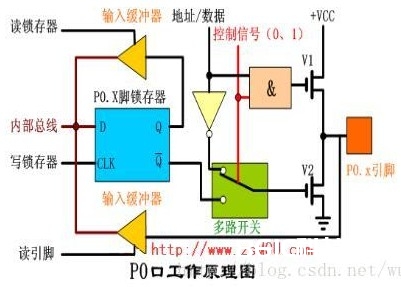
单片机P0口的内部结构及工作原理-当D端和CP/CLK端同时有信号输入后突然撤掉CP/CLK信号时,D的值将会被保存到(“锁”)在器件内,此时Q和~Q端并没有信号输出,等下一个时序再次输入到CP/CLK端,Q和~Q将会正常输出D端传送的信号;
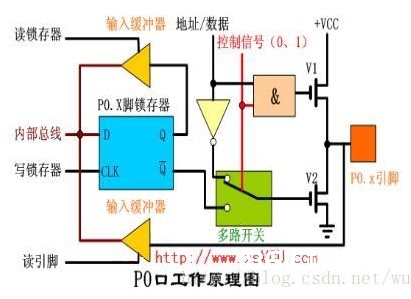
单片机p0口的工作原理解析-当D端和CP/CLK端同时有信号输入后突然撤掉CP/CLK信号时,D的值将会被保存到(“锁”)在器件内,此时Q和~Q端并没有信号输出,等下一个时序再次输入到CP/CLK端,Q和~Q将会正常输出D端传送的信号;
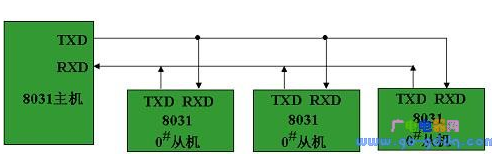
MCS-51单片机多机通信的工作原理解析-串行口以方式2或方式3接收时,若SM2为1,则仅当接收到的第9位数据RB8为1时,数据才装入SBUF,置位RI,请求CPU对数据进行处理;如果接收到的第9位数据RB8为0,则不产生中断标志RI,信息丢失,CPU不作任何处理。

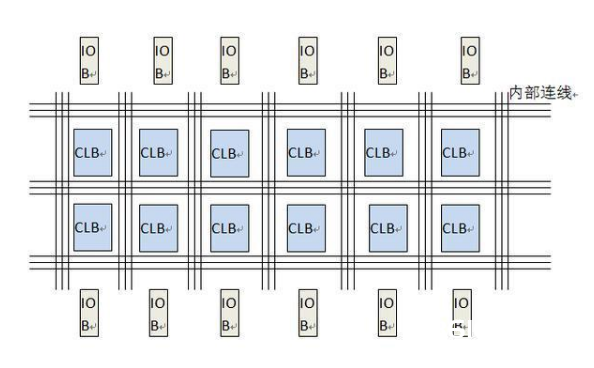
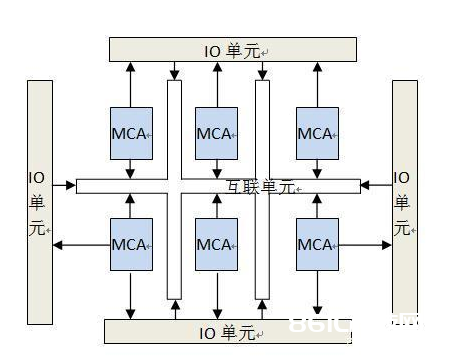
浅析FPGA的结构组成及工作原理-FPGA主要由大量的CLB来作为最小逻辑单元,使用内部连线将这些最小的逻辑单元连接,完成更大的逻辑功能单元,再与这些IOB连接完成最终结果或信号的输入输出。