


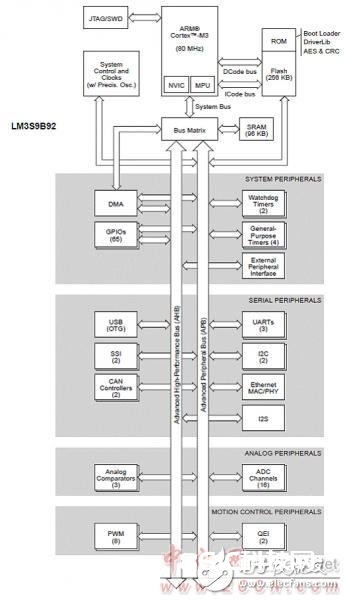
LM3S9B92微控制器特性参数与Stellaris机器人评估板介绍-TI为广阔的微控制器市场带来了32位功能和基于ARM Cortex-M3的微控制器的全部优势。对于目前的8位和16位MCU用户而言,采用Cortex-M3的Stellaris为其提供了强大的开发工具、软件和知识体系。移植到Stellaris上,用户就能够得益于很好的工具、小代码尺寸和出色的性能。

一文看懂PC机与单片机的通讯程序-大多数的电脑设备都具有RS-232C接口,尽管它的性能指标并非很好。在广泛的市场支持下依然常胜不衰。就使用而言,RS-232也确实有其优势:仅需3根线便可在两个数字设备之间全双工的传送数据。

STM32的优势在哪里?如何使用DMA来进行ADC操作?- STM32的优点在哪里? 除去宣传环节,细细分析。 STM32时钟不算快,72MHZ, 也不能扩展大容量的RAM FLASH, 同样没有DSP那样强大的指令集。 它的优势在哪里呢? —就在快速采集数据,快速处理上。 ARM的特点就是方便。 这个快速采集,高性能的ADC就是一个很好的体现, 12位精度,最快1uS的转换速度,通常具备2个以上独立的ADC控制器。
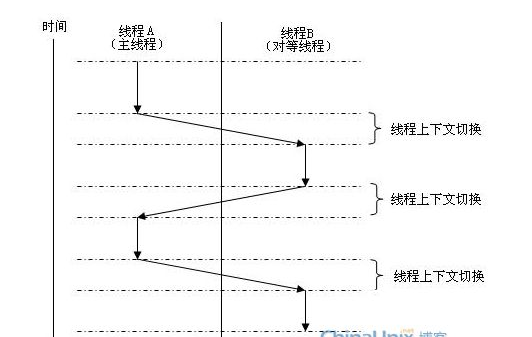
基于STM32的虚拟多线程(TI_BLE协议栈_ZStack协议栈)-基于STM32的虚拟多线程,可以很好的用于裸机程序中,用于模拟小型操作系统的多线程概念。本实例参考了参考TI_BLE协议栈_ZStack协议栈。

如何在MCU内完成ADC?-ARM的特点就是方便。 这个快速采集,高性能的ADC就是一个很好的体现,12位精度,最快1uS的转换速度,通常具备2个以上独立的ADC控制器,这意味着,STM32可以同时对多个模拟量进行快速采集,这个特性不是一般的MCU具有的。
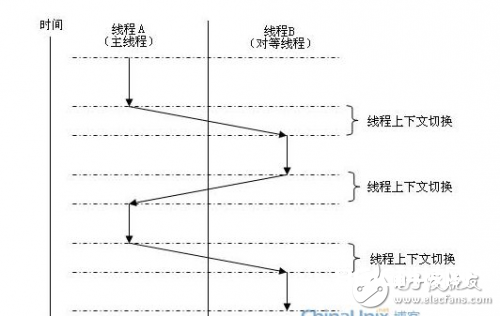
基于TI_BLE协议栈_ZStack协议栈解析-STM32多线程 基于STM32的虚拟多线程,可以很好的用于裸机程序中,用于模拟小型操作系统的多线程概念。

STM32F4发送和接收长度数据的判断-STM32F4 串口收发使用DMA还是很方便的。但是配置DMA时需要配置数据长度,这一点对于发送来说可以预估计自己发送的长度来配置DMA发送数据长度,但是对于接收不是很好解决,因为如果使用DMA接收中断是要配置的数据长度减到0才能出发中断。但是我们无法判断接受数据的长度,导致无法判断数据接收完成。
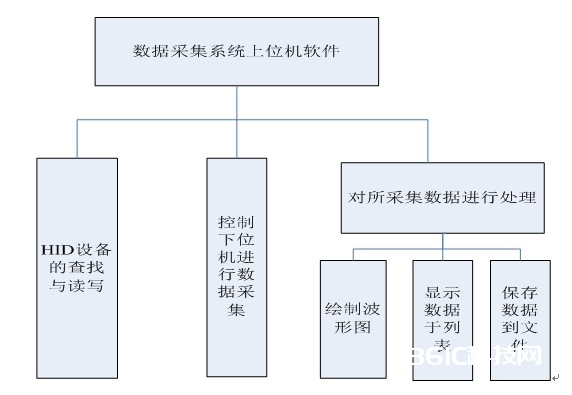
PIC单片机用于上位机数据采集的设计-C++程序设计语言可以很好地实现面向对象的编程思想,采用C++编写上位机程序,可以将每一个功能模块封装成一个类,修改某个类的实现,增加类的功能不会影响整个程序的框架,这样就很容易维护和扩展功能;加之我们要实现的软件功能中需要调用大量的windows API函数库,所以采用VC++6.0作为上位机的开发环境。

如何在STM32单片机上移植FreeRTOS-首先在网上看到大部分移植FreeRTOS 都是选择修改他的启动文件,我个人感觉这样不是很好,毕竟是汇编,当你采用不同的芯片型号时,又要修改不同的xx.S文件,所以我选择修改FreeRTOSconfig.h文件。
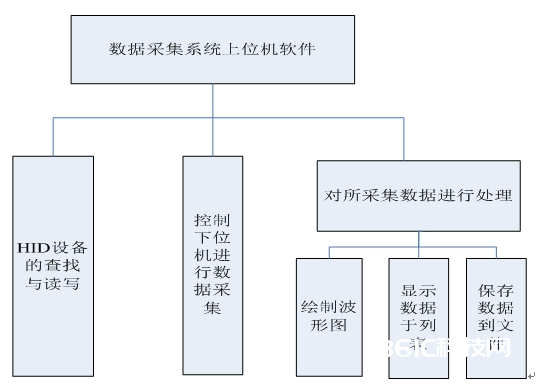
基于PIC单片机的数据采集系统设计-C++程序设计语言可以很好地实现面向对象的编程思想,采用C++编写上位机程序,可以将每一个功能模块封装成一个类,修改某个类的实现,增加类的功能不会影响整个程序的框架,这样就很容易维护和扩展功能。
