


STM32单片机PID算法的原则及应用方法-一、总体原则
PID调试一般原则
a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数Td。
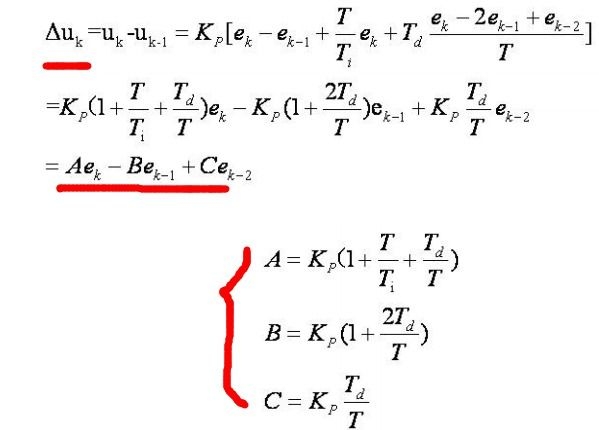
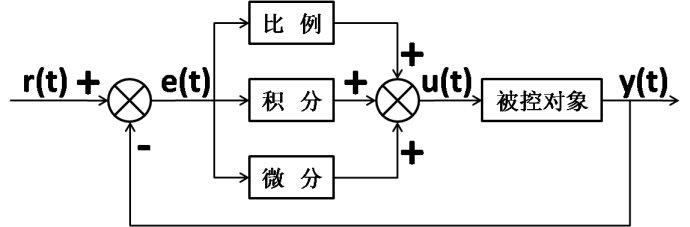
增量式PID算法的STM32实现 分析比例、积分、微分三个环节-虽然PID不是什么牛逼的东西,但是真心希望以后刚刚接触这块的人能尽快进入状态。特地分享一些自己如何实现的过程。 首先说说增量式PID的公式,这个关系到MCU算法公式的书写,实际上两个公式的写法是同一个公式变换来得,不同的是系数的差异。 资料上比较多的是: 还有一种的算法是: 这里主要介绍第二种,具体会分析比例、积分、微分三个环节的作用。 硬件部分: 控制系统的控制对象是4个空心杯直流电机,电机带光电编码器,可以反

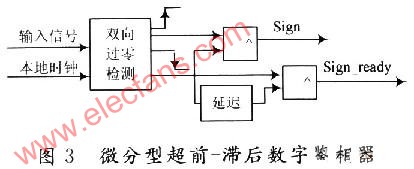
在过程控制和运动控制系统中,特别是在嵌入式控制系统中,PID(比例-微分-积分)控制器因其结构简单,物理意义明确,使用中不需精确的系统模型等先决条件应用广泛。鉴于嵌入式控制系统设计的严格要求,传统的嵌
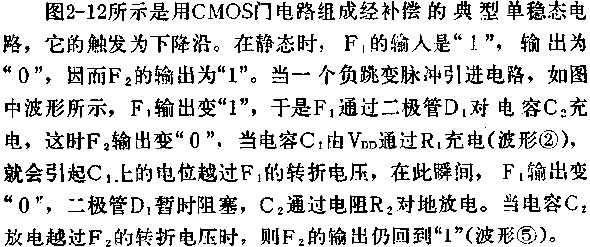
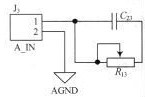
图中B和C是两个不同的单稳态电路,B是微分型下降沿触发的单稳态;C是上升沿触发的单稳态。图中B和A一样,输出脉冲的负跳变返回到输入,但这个电路不需要外接二极管。C是正跳变返回到输入。…
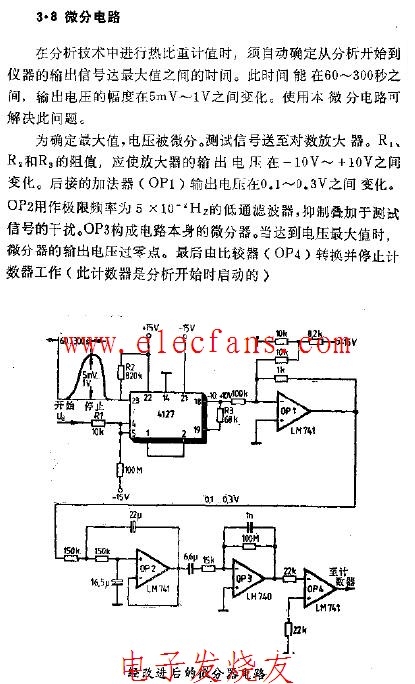
反相微分运算电路微分是积分的逆运算。将积分运算电路中R1和C的位置互换,可组成基本微分运算电路(图3.8a.6)。由运算放大器构成的微分运算电路的基本运算关系是微分运算电路可以实现波形变换,例如将矩形
集成运算放大器是一种高增益的直流放大器。它有两个输入端,一个输出端。外接负反馈电路后能够完成反相比例,同相比例,加法、减法、乘法,微分、积分等运算功能。现简介其中几种。?⒈反相比例运算?原理图如图13
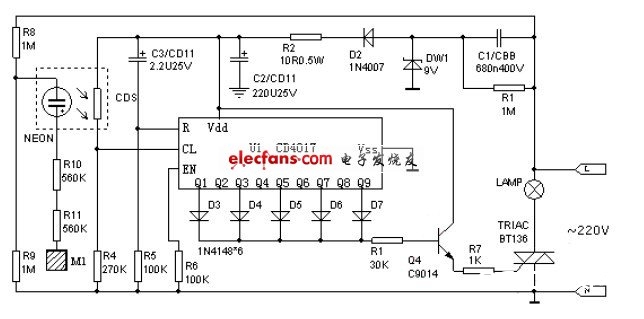
一、电路工作原理接通电源后,因C3、R5的微分作用,CD4017自动复位清零,插座为断电状态。当人手触摸M1后,氖灯发光,CDS的阻值减小使U1的CL端变为高电平,Q1由此输出高电平,使TRIAC导通
