


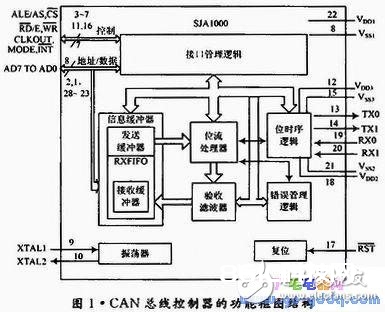
CAN总线控制器设计及测试程序-CAN(Controller Area Network)是由ISO定义的一种串行通信总线,它是一种能有效地支持高安全等级的分布实时控制的新一代网络通信协议,属于现场总线范畴。CAN最早被设计作为汽车环境中微控制器的通讯,在车载各电子控制装置与ECU之间交换信息,形成汽车电子控制网络,目前应用领域已经相当广泛。
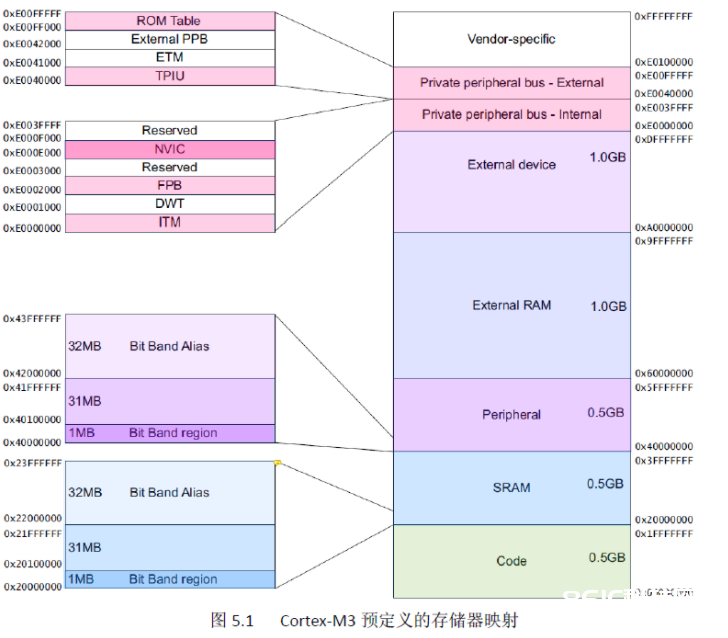
关于Cortex-M3存储器映射-CM3 的地址空间是4GB, 程序可以在代码区,内部SRAM 区以及外部RAM 区中执行。但是因为指令总线与数据总线是分开的,最理想的是把程序放到代码区,从而使取指和数据访问各自使用自己的总线,并行不悖。
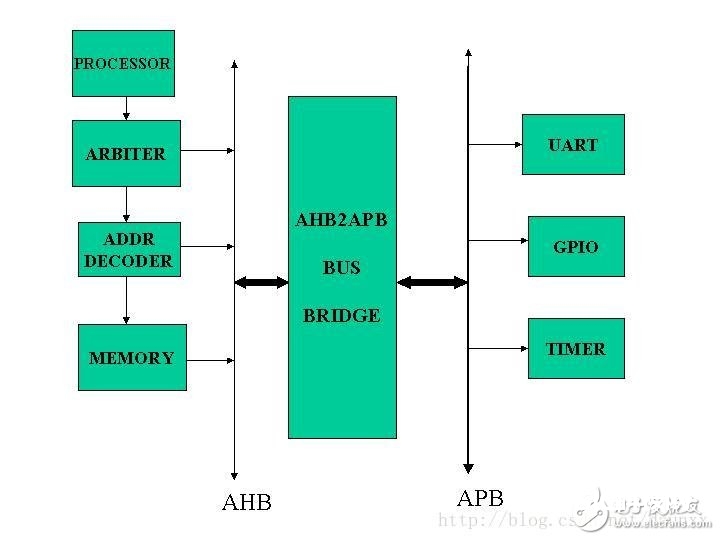
STM32之FSMC驱动LCD屏应用-FSMC其实就是把芯片内部的数据总线和地址总线引出来了,其实51单片机也是有这个总线外接的。没有说把SRAM读到内部内存再读到CPU,SRAM就是内存,直接读到CPU的寄存器,通过内部的AHB总线传输的。
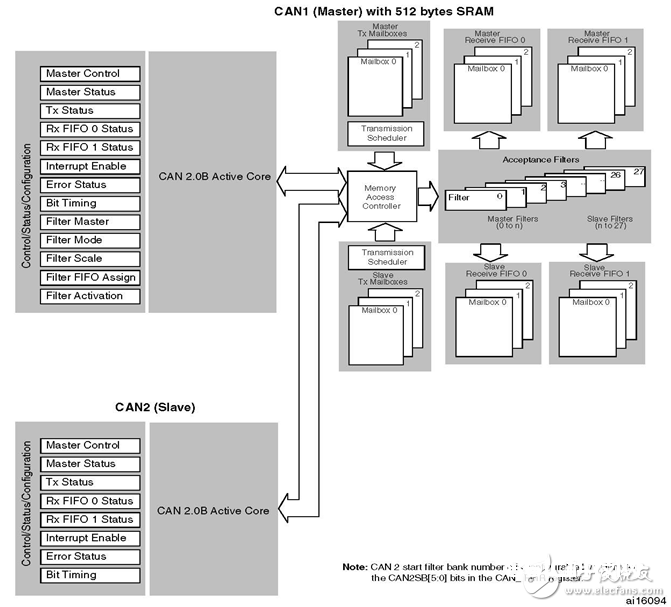
详解stm32的CAN控制器(程序分享)-首先简单介绍一下CAN总线,关于CAN总线是谁发明的,CAN总线的历史,CAN总线的发展,CAN总线的应用场合,这些,通通不说。这里只是以我个人理解,简单说说CAN通信。CAN总线的端点没有地址(除非自己在帧里定义地址),CAN总线通信不用地址,用标识符,不是单独的谁发给谁,而是,你总是发送给整个网络。
单总线制多机通讯系统的总线设计-本设计实现的多机呼叫系统的主要功能是:分机呼叫主机,利用单片微机向主机发送数字呼叫信息,主机响应后,显示出呼叫的分机号,打开主机和分机的模拟通道进行主机与分机的对讲;主机呼叫某分机,主机部分输出分机号,直接打开相应分机的模拟通道,进行分机与主机的对讲;群呼,主要逐一发送打开所有分机的数字信息,数秒之内打开所有分机的模拟通道,主机向各分机传送语音信号。
总线舵机是什么?基于STM32的单线串口通信-总线伺服舵机即串行总线智能舵机,实际上可以理解为数字舵机的衍生品,数字舵机与模拟舵机相比而言是控制系统设计上的颠覆,而总线伺服舵机对于舵机而言则是在功能和运用上的颠覆。舵机的运用方式实际上只能发挥出总线伺服舵机非常小的一部分功能。

基于使用STM8单片机I2C方式实现读写操作-STM8S的I2C模块不仅可以接收和发送数据,还可以在接收时将数据从串行转换成并行数据,在发送时将数据从并行转换成串行数据。可以开启或禁止中断。接口通过数据引脚(SDA)和时钟引脚(SCL)连接到I2C总线。允许连接到标准(最高100kHz)或快速(最高400kHz)的I2C总线。

如何采用51单片机连接24C02-C语言测试代码-1.关闭非IIC通信器件,比如我的开发板SDA和SCL也连接了DS1302,造成干扰会没有结果。
2.IIC通信的应答,发送端在SCL为0时将SDA置1,等待接收端拉低SDA;接收端在拉低SDA持续一个周期后,应将SDA置1释放总线。
如何采用C51单片机读写CAT24C32-#defineWriteDeviceAddress0x0A2//定义器件在I2C总线中的写地址(注意:根据自定义从机地址接口改变)
#defineReadDviceAddress0x0A3//定义器件在I2C总线中的读地址(注意:根据自定义从机地址接口改变)
sbitSCL=P0^4;//我的24C32接口设置
