



本站为您提供的制动电阻坏了会怎么样_制动电阻损坏愿意分析,安川变频器制动电阻坏了要看负载惯性以及停机时间的,如果负载惯性较小,一般没什么问题;负载惯性较大,停机时间较短的情况下,制动电阻损坏,有可能导致变频器的逆变模块频繁损毁。
基于模糊控制和QR码的精确定位方法设计详解-自动引导车(Automated Guided Vehicle,AGV)是现代物流行业的高效运输工具。但是,在AGV运行过程中,导航定位精度差,一直制约其在许多工业环境下的应用。提出一种最优偏差路径的AGV纠偏方法,可以实现5 mm范围内纠正,但是系统鲁棒性较差。采用了一种基于惯性导航和视觉里程计的定位算法,实现视觉辅助定位,克服惯性导航的不足,但是仍然无法实现后期AGV的位置修正;采用自定义定位标识符法,在地面铺设停车标识,系统识别停车标志符后,即根据直线运动公式计算AGV停车距离,直至距离为0,但后期缺少视觉信息反馈,不具备停车纠偏能力。

基于MEMS技术的IMU惯性测量单元的工作原理解析-惯性测量单元Inertial measurement unit,简称IMU,是测量物体三轴姿态角(或角速率)及加速度的装置。陀螺仪和加速度计,是惯性导航系统的核心装置。借助内置的加速度传感器和陀螺仪,IMU可测量来自三个方向的线性加速度和旋转角速率,通过解算可获得载体的姿态、速度和位移等信息。
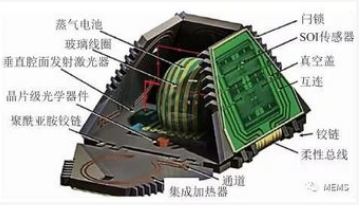
基于闭环MEMS的电容式惯性传感器设计-微机械式惯性传感器已经成为许多消费产品的一个组成部分,比如手持式移动终端、照相机和游戏控制器等。此外,微机械式惯性传感器还被广泛用于工业、汽车安全和稳定控制以及导航领域中的振动监测。
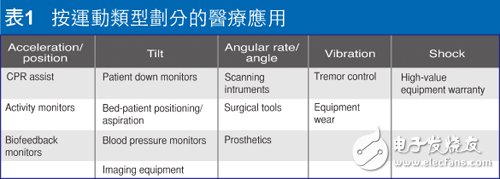
多轴传感器受追捧 MEMS加速挺进医疗设计-多轴惯性传感器已日益受到医疗应用市场青睐。融合多轴感测功能的惯性MEMS元件,不论尺寸、功耗、精准度与可靠性均有优异表现,可符合医疗应用领域的严苛要求,如手术导航工具等精密医疗仪器,皆已开始大量导入。
基于三重冗余惯性传感器而设计的OpenRTK330接收器介绍-OpenRTK330内置的多频段RTK/GNSS接收器,可与冗余惯性传感器相结合,在GNSS中断期间仍旧保持厘米级精度。其集成的IMU系统,让自动驾驶系统开发工程师在合理的预算范围内最大程度地提高车辆的定位准确性,从而达到性能与成本的最高性价比。
MEMS惯性传感器的分类及应用解析-MEMS惯性传感器包括MEMS陀螺仪及MEMS加速度计,其分类有多种方式,根据精度由低到高其可分为消费级(零偏》100°/h)和战术级(零偏0.1°/h ~ 10°/h)。
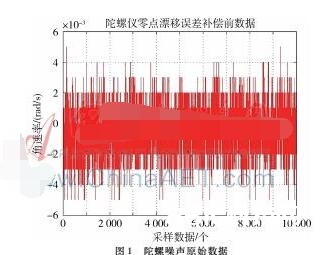
基于DSP的MEMS陀螺误差建模与滤波方法分析-随着微机电和惯性技术的发展,MEMS惯性器件技术越来越成熟,MEMS陀螺以其性能高、尺寸小、能耗低、可靠性高、重量轻、价格低等优点,在低成本姿态测量系统中的应用越来越广泛。
MEMS惯性测量单元(IMU)/陀螺仪对准基础-对于在反馈环路中采用MEMS惯性测量单元(IMU)的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。

MEMS在无人系统领域有着巨大的应用潜力-MEMS惯性导航在过去数十年内得到了迅速发展,在无人系统领域内得到了越来越多的应用,其作为未来惯性导航的主要发展方向,正在展现出强大的潜力以及良好的应用前景。
