MEMS惯性测量单元(IMU)/陀螺仪对准基础-对于在反馈环路中采用MEMS惯性测量单元(IMU)的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。

VR利器惯性动作捕捉系统原理及优缺点解析-那么惯性式动作捕捉系统是如何正确运用在虚拟现实中的呢?本文将对惯性动捕的工作原理、优势,及其存在的缺点进行解析,希望能与业内人士共同探讨。
VR惯性式动作捕捉系统解析及典型方案-虚拟现实成为了目前最受关注的智能设备,为了带来良好的体验,VR设备对硬件提出了更高的要求,传感器就是其中关键的一部分。虚拟现实中的传感设备主要包括两部分:一部分用

如何有效测试LED灯的启动、上升和频闪效应-由于LED固态照明产品具有的发光效率好,寿命长,可靠性高等独特特性,因而越来越受市场和消费者的青睐。但同时由于LED响应速度快,而且也不具备传统灯具的热惯性
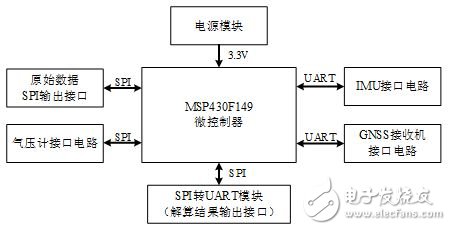
采用MSP430的机器人定位系统电路设计-本文以低功耗MSP430F149为核心,设计了能够同时实现卫星导航(GNSS)接收机、惯性测量单元(IMU)、气压高度等导航信息的高速采集与高速合路传输,并进
轮式遥控机器人导航系统电路设计攻略 —电路图天天读(166)-因此本项目采用了具有强大数字信号处理功能的DSP28335芯片和PC控制终端,实现惯性传感器的数据采集、时序逻辑控制、与驱动系统通信和地图