


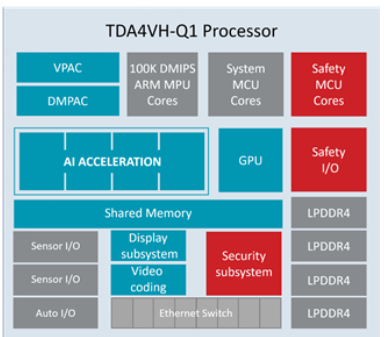
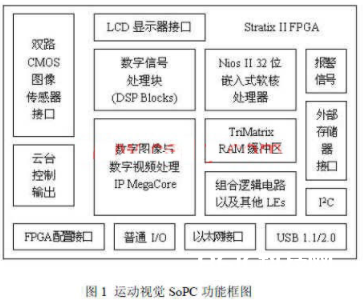
采用StratixII系列FPGA器件实现运动视觉处理系统的设计-该模块主要负责视频图像的采集,摄像头参数的设置和云台步进电机的控制。其中,通过 I2C总线可以设定摄像头内部控制寄存器。在 FPGA中,实现 I2C总线控制器的途径有两种:一种是在 Nios II中用软件模拟实现;另一种是采用第三方,比如 Sciworx,CAST,Digital Core Design等公司提供的 IP核。
成像雷达:一个传感器控制所有传感器-业界对三种主要传感器(摄像头、雷达和LIDAR)在汽车中的不同作用,以及它们各自如何满足先进驾驶辅助系统(ADAS)和自动驾驶的感测需求仍然存在一些困惑。

自动驾驶中的传感器技术解析-在自动驾驶技术的研发中,选择以激光雷达还是摄像头为主要传感器是首要解决的问题,它们代表着两套完全不同的系统——激光SLAM(Simultaneous Localization And Mapping)和视觉SLAM。

摄像头行业主要产能瓶颈:CMOS芯片代工与封测环节-从需求端而言,智能手机硬件升级为摄像头需求激增提供动力。从供给端看,CMOS 芯片代工与封测环节为全产业链扩产瓶颈。

通过温度开关保护室外摄像头免受极端天气的影响-室外摄像头在安保应用中扮演者重要角色,因此,无论处于热带、寒带,还是日温差极大的气候,都需要确保它们不会运转失常或发生故障。

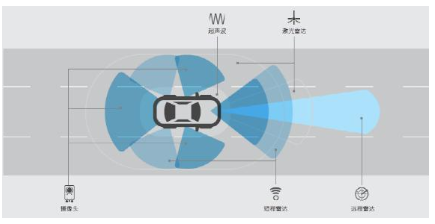
高精度传感器在汽车自动驾驶中的应用-如今,高级驾驶辅助系统(ADAS)中的高精度传感器正为拯救道路上的生命提供安全保障。这些高精度传感器包含了一系列摄像头、激光雷达、雷达、计算,以及绘图技术。

豪威科技推出一款新型图像传感器OV08B支持自拍摄影和多摄像头应用-加利福尼亚州圣克拉拉——-2019年2月22日——行业领先的数字图像解决方案开发商豪威科技公司(OmniVision Technologies, Inc.)面向广泛的智能手机相机应用市场,推出最新一代1.12微米,800万像素图像传感器家族成员——OV08B。这款新型图像传感器支持主流智能手机自拍摄影和多摄像头应用。

