基于CPLD的开放式四轴运动控制器的硬件、软件设计-运动控制器是利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制。目前采用运动控制器的数控系统已成为新一代数控技术发展潮流,运动控制器将成为未来数控系统的核心。

FANUC 0i – D 数控系统的以太网硬件设备主要有以下两种: 快速以太网板( Fast Ethernet Board) 和数据服务器板( Fast Data Server Board) ,对应

FANUC 0i – D 数控系统的以太网硬件设备主要有以下两种: 快速以太网板( Fast Ethernet Board) 和数据服务器板( Fast Data Server Board) ,对应
0 引言实时性是数控系统一项重要的性能指标。通信在IPC(Industrial Personal Computer)与运动控制器构成的开放式数控系统开发平台上,虽然这种主从式结构,

数控系统作为数控机床的核心装备,对国民经济的一些重要行业(如国防军工、航天航空、it行业、汽车、轻工、冶金、医疗等)的发展起着越来越重要的作用。开放式、智能化、网络化成为当代数控系统发展的主要趋势。上

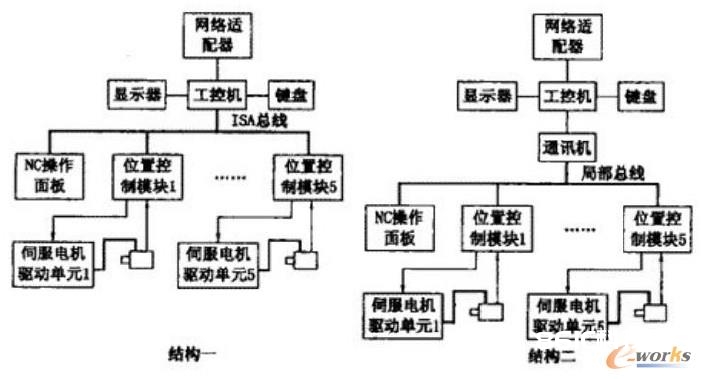
1 前言目前,国内外的数控系统大多采用X86体系结构的CPU,主要是因为X86体系结构上拥有丰富的应用软件,开发环境和技术积累,可以在一定程度上缩短数控系统的开发周期.但X86体系结构也有其自身的缺点