



本篇博客为斯坦福ML公开课第五个视频的笔记,主要内容包括生成学习算法(generatelearningalgorithm)、高斯判别分析(GaussianDiscriminantAnalysis,

本篇笔记针对斯坦福ML公开课的第6个视频,主要内容包括朴素贝叶斯的多项式事件模型(MultivariateBernoulliEventModel)、神经网络(NeuralNetwork)、支持向量

本篇对应斯坦福公开课的第8个视频,主要讲述了SVM(SupportVectorMachine,支持向量机)的剩余部分。即核技法(Kernels)、软间隔分类器(softmarginclassifi

本文对应斯坦福ML公开课的第12个视频,第12个视频与前面相关性并不大,开启了一个新的话题——无监督学习。主要内容包括无监督学习中的K均值聚类(K-means)算法,混合高斯分布模型(Mixtur

本文是《斯坦福ML公开课笔记13A》的续篇。主要讲述针对混合高斯模型的问题所采取的简单解决方法,即对假设进行限制的简单方法,最后引出因子分析模型(FactorAnalysisModel),包括因子

磁共振(magnetic resonance,MR)现象早在1945年由布洛克领导的斯坦福小组和普塞尔领导的麻省理工学院小组分别独立地发现。但直到20世纪60年代,高磁场、高分辨率.
在实现自主导航之前 移动机器人都有哪些避障方法?-世界上第一台真正意义上的移动机器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它装备了电视摄像机、三角
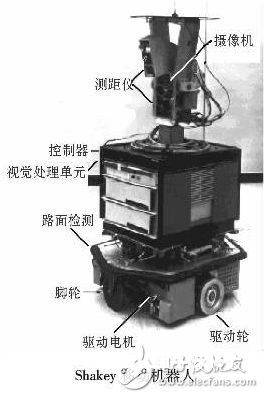
移动机器人的那些避障方法你知多少?-世界上第一台真正意义上的移动机器人是斯坦福研究院(SRI)的人工智能中心于1966年到1972年研制的,名叫Shakey,它装备了电视摄像机、三角测距仪、碰撞传感器
本篇博客为斯坦福ML公开课第五个视频的笔记,主要内容包括生成学习算法(generatelearningalgorithm)、高斯判别分析(GaussianDiscriminantAnalysis,
