


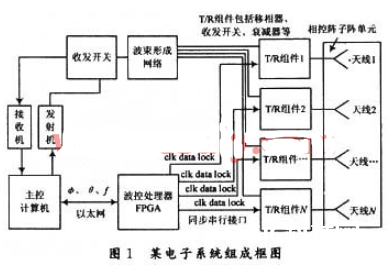
采用可编辑逻辑器件和VHDL语言实现波控系统设计的设计-相控阵是通过波控系统控制阵列天线各单元通道的相位、幅度以形成空间波束并控制其方位角和俯仰角。早期的波控系统一般采用硬件电路来实现,这种实现方法的缺点是设备量大,不灵活,很难实现波束的复杂计算,不易满足特殊要求。后来采用单片机、DSP芯片来设计波控系统,单片机通常不计算波控码,仅仅是根据接收到的波控码布相,而DSP可以自己计算波控码,但是单片机、DSP都是象流水线一样串行的运行指令,也就是说,不能并行地对各天线单元通道进行波控码计算和布相。
利用FPGA开发的太阳能自动跟踪系统设计-当时间为正常光照时间时,太阳跟踪系统每隔5 min就会进入太阳高度角方位角进行计算。计时模块输出给太阳高度角方位角模块所需的时间信息,然后计算赤道坐标系下的赤纬角和时角,最后计算高度角方位角坐标系下的高度角和方位角值,并输出高度角和方位角值如图6所示,仿真波形如图7所示。高度角和方位角输出均为10 b Q7格式。

MEMS和MR传感器组成姿态测量系统-本文论述了由MEMS加速度计和MR传感器组成的姿态测量系统。在本系统中,三轴MEMS加速度计用来获得载体基于重力向量的俯仰角和横滚角,而三轴MR传感器的输出经过以俯仰角和横滚角为参数的矩阵变换后可以给出载体相对于地磁北极的方位角。

摘要:主要介绍了双轴驱赶式自动追踪太阳光的太阳灶加湿器的设计,采用光电转换原理制成。本系统以单片机为核心,构建了由光电二极管检测和比较,方位角和高度角双轴机械跟踪定位系统组成的自动控制装置,设计出一套


针对四元十字阵声定位算法精度易受探测目标方位角影响的问题,提出采用基于五元十字阵被动声定位算法。根据试验测试特点,研究了五元十字阵探测阵元间的空间关系及TDOA被动声定位算法的特点,建立改进的五元十字
针对这种复杂的测试要求以及测试点的地理环境和天气状况,如果采用手动调整测试天线的方位角、仰角将给测试工作带来巨大的工作量,而且手动调整 测试天线方位角、仰角的精度差、效率低,特别是在夜间低温测试时,还

MEMS和MR传感器组成姿态测量系统-本文论述了由MEMS加速度计和MR传感器组成的姿态测量系统。在本系统中,三轴MEMS加速度计用来获得载体基于重力向量的俯仰角和横滚角,而三轴MR传感器的输出经过以俯仰角和横滚角为参数的矩阵变换后可以给出载体相对于地磁北极的方位角。
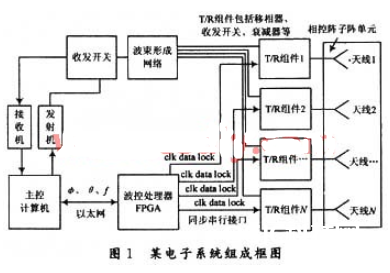
采用可编辑逻辑器件和VHDL语言实现波控系统设计的设计-相控阵是通过波控系统控制阵列天线各单元通道的相位、幅度以形成空间波束并控制其方位角和俯仰角。早期的波控系统一般采用硬件电路来实现,这种实现方法的缺点是设备量大,不灵活,很难实现波束的复杂计算,不易满足特殊要求。后来采用单片机、DSP芯片来设计波控系统,单片机通常不计算波控码,仅仅是根据接收到的波控码布相,而DSP可以自己计算波控码,但是单片机、DSP都是象流水线一样串行的运行指令,也就是说,不能并行地对各天线单元通道进行波控码计算和布相。
