


基于STM32的四旋翼飞行姿态串级控制的设计与实现-本文主要介绍了基于STM32的四旋翼飞行姿态串级控制的设计与实现,行器控制器通过处理微型MEMS惯性器件和三维地磁传感器采集的数据,计算飞行器的姿态角,并根据飞行指令,结合相应的控制律给出适当的控制信号,控制飞行器姿态和位置。能够实现飞行姿态的稳定控制,达到了设计的目的。
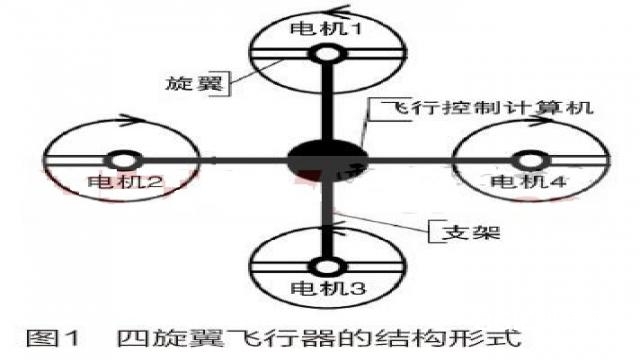
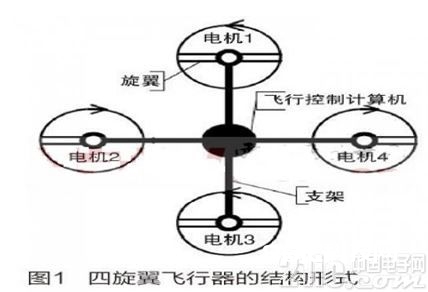
引言四旋翼飞行器是一种具有6个自由度和4个控制输入的可垂直起降、悬停、前飞、侧飞和倒飞的无人驾驶飞行器,4只旋翼可相互抵消反扭力矩,不需要专门的反扭矩桨。被广泛应用于无人侦察、森林防火、灾

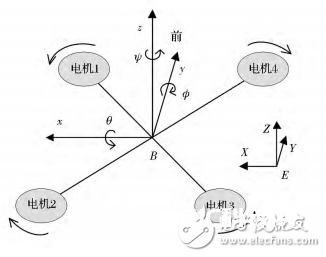
尝试制作这个四旋翼飞控的过程,感触颇多,整理了思绪之后,把重要的点一一记下来;这个飞控是基于STM32,整合了MPU6050,即陀螺仪和重力加速计,但没有融合电子罗盘;另外,四旋翼飞行器的
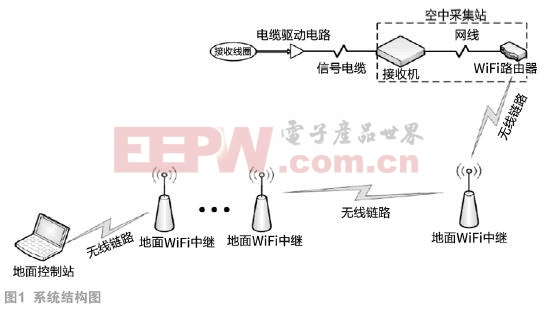
本文介绍了一种以四旋翼飞行器为载体的时域地空电磁探测系统。该系统采用Cortex-M3内核处理器,以全差分模拟前端压制电磁干扰,实现了24位低噪声、多通道电磁数据同步采样及存储,实现了一套由四旋翼飞行
单旋翼无人机与遥控直升机有区别吗?-近两天就有外媒报道,美国的研究人员创造出了一款只有一个旋翼的无人飞行器,该无人机采用了非对称的设计,更重要的是,整个无人机唯一可以移动的部件也只有一个螺旋桨。
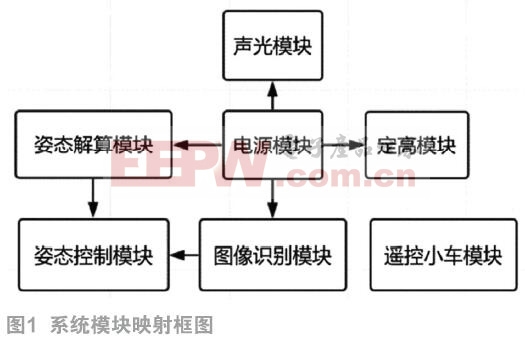
随着四旋翼飞行器技术的不断应用,无人机的各种用途被不断发掘出来。基于四旋翼飞行器相对平稳的飞行状态和可控等特点,利用四旋翼飞行器进行探测和跟踪目标成为可能。本文介绍了一种四旋翼自主飞行探测跟踪系统,该

介绍了一种基于四旋翼飞行器快速、稳定探测和跟综地面上有色信标的系统。该系统由三部分组成:具有探测和跟踪功能的四旋翼飞行器、可遥控移动的有色信标小车和遥控终端(地面站)。四旋翼飞行器、可遥控移动的有色信
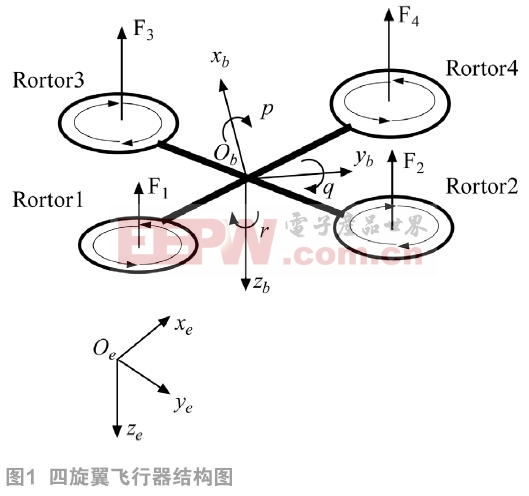
针对在参数变化、外部干扰条件下四旋翼飞行器的稳定飞行控制问题,本文提出了一种基于反步法的四旋翼飞行器增稳控制方法。首先,建立四旋翼飞行器的动态模型。其次,基于反步法设计的控制器用于飞行器姿态控制,采用
