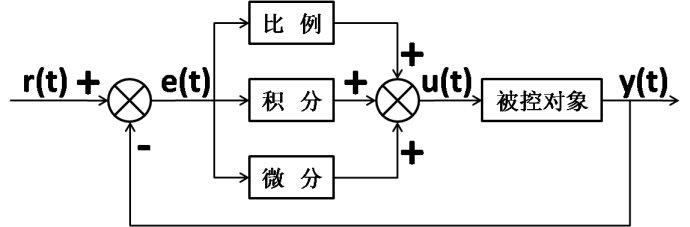
STM32单片机PID算法的原则及应用方法-一、总体原则
PID调试一般原则
a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数Td。



STM32单片机PID算法的原则及应用方法-一、总体原则
PID调试一般原则
a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数Td。

