


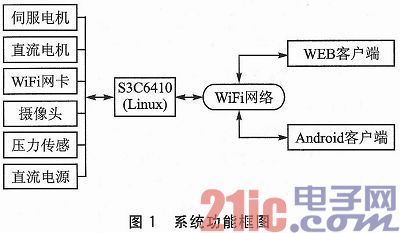
基于WiFi网络的可视化遥控搬运机器人设计, 引言随着科学技术的快速发展,机器人已经渐渐步入人们的实际生活之中,本设计所研究的遥控搬运机器人是众多机器人中的一种。搬运机器人主要代替人完成物体的夹取、运
基于WiFi网络的可视化遥控搬运机器人设计, 引言随着科学技术的快速发展,机器人已经渐渐步入人们的实际生活之中,本设计所研究的遥控搬运机器人是众多机器人中的一种。搬运机器人主要代替人完成物体的夹取、运
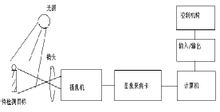

视觉技术就是用机器代替人眼来做测量和判断,它通过镜头(Camer a)摄取图像,并将像素的分布,亮度,颜色等信息,转变成数字化信号;图像系统对这些信号进行运算以抽取图像的特征, 并在此基础上实现模式识

精华:基于ARM处理器的机器人硬件设计-随着人们生活水平的日益提高,我国人口的老龄化也越来越明显,吸尘机器人作为服务机器人的一种,能够代替人进行清扫房间、车间、墙壁等一些简单劳动。
仿人型机器人控制系统设计的几个问题-仿人型机器人由于具有类人的基本外形,在实际的生活中,能够代替人完成很多工作,因此对仿人型机器人的研究具有实用价值,各国都在投入巨大的人力物力进行研发。

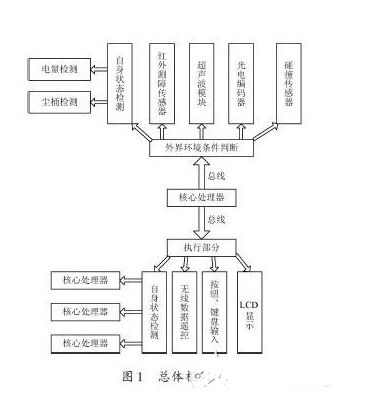

以ARM处理器为基础的吸尘机器人硬件设计方案详解- 随着人们生活水平的日益提高,我国人口的老龄化也越来明显,吸尘机器人作为服务机器人的一种,能够代替人进行清扫房间、车间、墙壁等一些简单劳动。
