


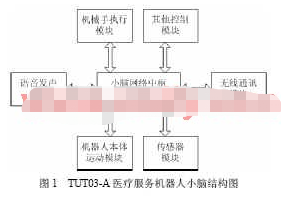
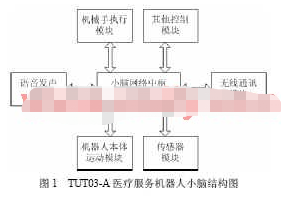
基于复杂可编程逻辑器件和MCU实现机器人小脑网络结构的实现-随着机器人各相关技术的不断发展,机器人本体功能越来越趋于模块化,机器人的核心控制部分已经逐渐从机器人本体中分离出来。以我们自行设计、开发的“TUT03-A型医疗服务机器人”为代表的基于远程脑概念[1,2]的机器人,将大脑脱离机器人本体,大脑置于母环境中,并用无线通讯与本体进行交互。
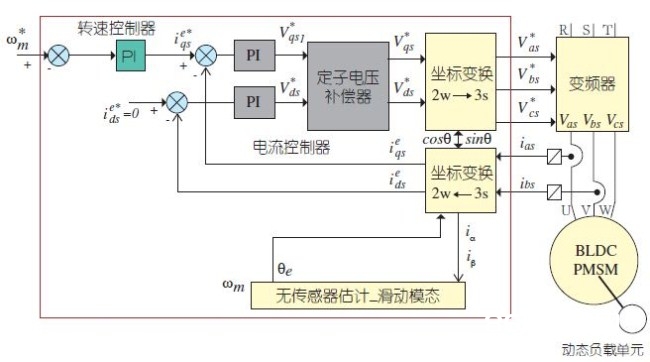
根据美国能源局的统计,全球的能源约一半是被电机所消耗,因此如何改善电机控制系统的耗能便成为一个重要的课题。要降低电机的耗能,除了电机由交流电机走向直流无刷电机(BLDC)及电机本体的能效设计由IE1走
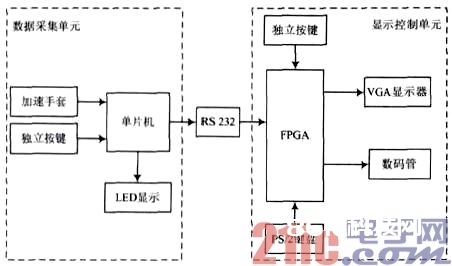
体感游戏是视觉与本体感觉和动作控制的集合,伴随着虚拟现实技术的迅猛发展,正逐步走入市场。为了达到视觉、运动相结合的目的,采用加速度传感器与VGA显示器相结合的方法,通过戴有速度手套的手的运动来完成对游





黎长源,李帅,项永金(格力电器(合肥)有限公司,安徽 合肥 230088)摘要:针对空调用IPM模块生产过程及运输周转过程中出现IPM本体开裂问题,本文从IPM失效机理、器件结构工艺设计、器件
基于复杂可编程逻辑器件和MCU实现机器人小脑网络结构的实现-随着机器人各相关技术的不断发展,机器人本体功能越来越趋于模块化,机器人的核心控制部分已经逐渐从机器人本体中分离出来。以我们自行设计、开发的“TUT03-A型医疗服务机器人”为代表的基于远程脑概念[1,2]的机器人,将大脑脱离机器人本体,大脑置于母环境中,并用无线通讯与本体进行交互。
