


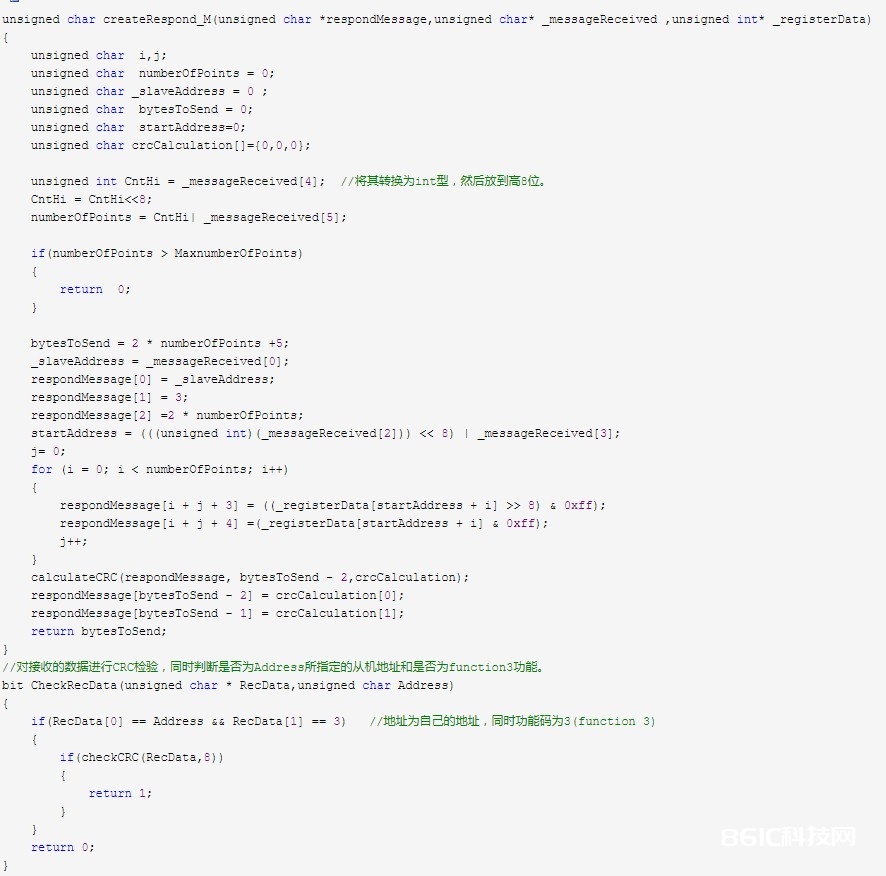
基于PC和单片机实现MODBUS RTU通信-最近研究了一下MODBUS通信,在STC12C5A60S2单片机上实现了MODBUS协议的部分功能,方便上位机从单片机系统上获取数据,比如由单片机获取的温度、湿度、或者控制信号的状态等。
如何将UCOSII移植到51单片机上-一、准备工作
1. 开发环境: Keil C集成开发环境
2. 源代码:UCOSII的源代码,网上可以自己下载
3. 文件分析:
1)UCOSII文件中与处理器无关的文件:
OS_CORE.C
OS_FLAG.C
OS_MBOX.C
OS_MEM.C
OS_MUTEX.C
OS_Q.C
OS_SEM.C
OS_TASK.C
OS_TIME.C
UCOS_II.C
UCOS_II.H


如何解决AVR单片机上电复位工作混乱的问题-从上表中可知,上电复位的典型门限电压是1.4V和1.3V,即在单片机上电时,其电源电压要低于此值,才能使单片机上电复位。单片机的正常工作电源电压范围是2.7~5.5V。当电源电压低于2.7V时,单片机已经停止工作,如果此时电压高于1.3V,并且再次上电,则单片机不能正常复位,导致工作混乱。

如何使用代码清除STM32单片机上的PCROP-STM32PCROP专有代码读出保护,将某个区域设置为仅允许执行,可防止代码被非法读出与修改。ST网站提供了免费的PCROP参考代码,但是例程中仅仅提供了用代码设置PCROP。
Linux虚拟机上安装Xilinx petalinux2015.4版本详细步骤-首先是“管理”-》“全局设定”-》“常规”-》默认虚拟电脑位置:选择一个专门用来放置虚拟机的位置,并保证存储空间足够大

液压传感助力公路非机动车辆提升效率和安全性-霍尼韦尔智能位置传感器采用非接触式磁阻技术来准确检测在恶劣的运输应用中的位置信息,可应用于挖掘机上,有助于保持车辆稳定,确保操作人员的安全。

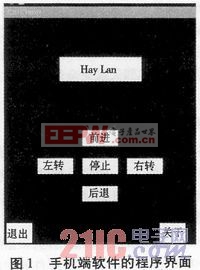
摘要:介绍一种通过利用我们普通智能手机来遥控智能车的一种设计方案,通过本设计所提供的软件安装于Android系统的手机上,可轻松通过其蓝牙通信模块来遥控我们的试验用智能车,另外加之本小车本身具有的循线

