


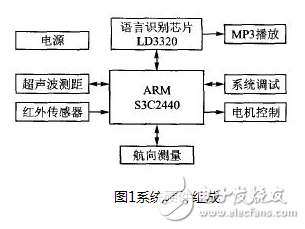
以嵌入式处理器S3C2440为核心的多任务机器人控制系统设计详解- 随着科学技术的发展和社会的需要,移动机器人技术得到了迅速发展,正在渗透到各行各业中,使人们的生活更加便利。现今以单片机为核心的移动机器人存在处理数据量有限、控制系统速度低、人机交互机制单一等缺点,不能满足机器人多任务的要求。系统中增加协处理器的系统结构也得到了广泛应用,虽然可以管理多种传感器,但这种结构却增加了硬件的冗余度和复杂度,见参考文献。为此,提出了以嵌入式处理器S3C2440为核心的多任务机器人控制系统。

常用的机器人编程方法有哪些-机器人编程【robotprogramming】为使机器人完成某种任务而设置的动作顺序描述。机器人运动和作业的指令都是由程序进行控制,常见的编制方法有两种,示教编程方法和离线编程方法。

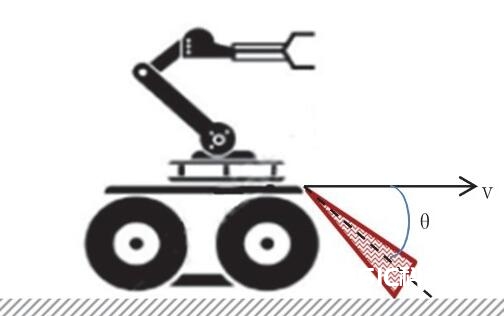
红外测距传感器的原理以及在AGV小车中的应用介绍-从20世纪70年代末开始,随着计算机的应用和传感技术的发展,以及新的机器人导航算法的不断推出,移动机器人研究开始进入快车道。
本站为您提供的多种传感器协同工作,使扫地机器人智能清扫,前些时间,石头发布了旗下两款年度旗舰,石头扫地机器人T7以及石头扫地机器人T7 Pro,作为新一代的智能清洁工具。不过这一次,笔者要和大家分享的并不是它的清洁能力,而是它的越障脱困性能和背后的传感器。

基于OPT9221 ToF传感器的立体视觉和深度感知电路设计-成像对于许多机器人应用至关重要,能让机器人执行基本任务,躲避障碍物,进行导航以及确保基本安全。

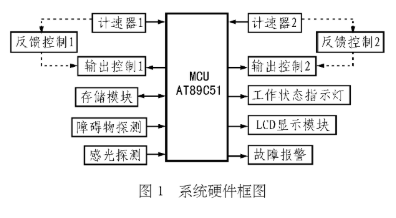
基于AT89C51微控制器实现具有道路学习记忆的机器人设计-随着科学技术的不断发展,机器人技术在航天、海洋、军事、建筑、交通、工业及服务业等领域已经取得广泛的应用和发展。而在一些特殊场合(如航天、深海作业及核工业等领域),以无人探察车、无人排险车及无人运输车等为代表的机器人技术越来越受到关注。为此,笔者设计了一种具有道路记忆功能、使用灵活方便、应用范围较广的轮式移动机器人模型。
毫米波雷达传感器在机器人中的应用-在现代建筑中,玻璃墙和隔墙是常见的应用,而服务型机器人(例如真空吸尘或拖地机器人)需要感知这些表面以防止碰撞。事实证明,使用摄像机和红外传感器很难检测这些元素。但毫米波传感器可检测到玻璃墙的存在及其后面的物体。


