



机器人交通安全运行的关键是传感器-市场研究与策略咨询公司Yole指出:2019年,全球机器人车辆的产量在几千辆左右。预计到2032年,年产量将达到40万辆,累计总产量达到10亿辆。

基于ARM处理器和CPLD技术实现智能移动机器人系统设计-该系统设计的轮式移动机器人机械导航结构采用四轮差速转向式的机械机构,前面两个轮是随动轮,起支撑作用,后面两个轮是驱动轮,由两台同步电机驱动,分别控制两个驱动轮的转速,可使机器人按照不同方向和速度移动,运动灵活,可控性好。


基于3D视觉技术和PLR传感器的机器人引导部件定位装置设计-部件抓取是工厂自动化中最重要的应用之一。与传统的人工处理和半自动输送相比,采用灵活的机器人来完成这项任务将是性价比更高的一种选择。那么,针对机器人引导的部件定位装置需要满足可靠性高、输出结果具有可重复性的功能,同时必须简单易用。
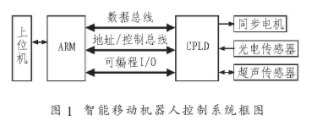
基于ARM处理器和CPLD技术实现智能移动机器人系统设计-该系统设计的轮式移动机器人机械导航结构采用四轮差速转向式的机械机构,前面两个轮是随动轮,起支撑作用,后面两个轮是驱动轮,由两台同步电机驱动,分别控制两个驱动轮的转速,可使机器人按照不同方向和速度移动,运动灵活,可控性好。
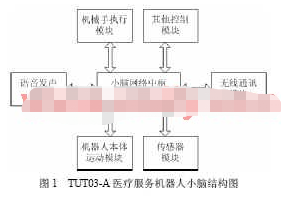
基于复杂可编程逻辑器件和MCU实现机器人小脑网络结构的实现-随着机器人各相关技术的不断发展,机器人本体功能越来越趋于模块化,机器人的核心控制部分已经逐渐从机器人本体中分离出来。以我们自行设计、开发的“TUT03-A型医疗服务机器人”为代表的基于远程脑概念[1,2]的机器人,将大脑脱离机器人本体,大脑置于母环境中,并用无线通讯与本体进行交互。

传感器在工业机器人中的作用-目前,工业机器人在制造业行业中的应用可谓十分广泛。很多企业也在建设智能工厂,推进生产线的智能化改造升级,通过引入智能化生产线与智能协作机器人,实现人机协作、自动化柔性组装、工序间物流自动传递等。

本站为您提供的机器人将为世博园公交换电池,机器人将为世博园公交换电池 上海世博会期间,园区内越江公交线上将投放120辆纯电动车,而在专设充电站为这些车辆更换电池的将是专用机器

