


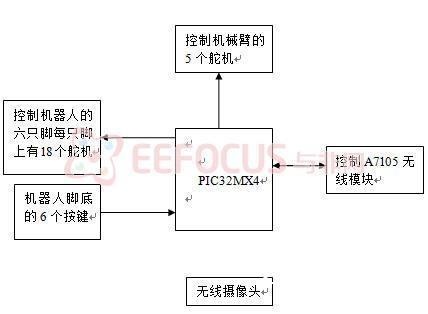
本设计通过以MIPS构架的PIC32单片机实现对仿生六足机器人基本步态控制,使机器人可按照典型步态协调灵活运动。该六足机器人前进一步的最大距离是8CM 。一次拐弯的最大角度为30度。机械臂夹起来的重物
基于WiFi网络的可视化遥控搬运机器人设计, 引言随着科学技术的快速发展,机器人已经渐渐步入人们的实际生活之中,本设计所研究的遥控搬运机器人是众多机器人中的一种。搬运机器人主要代替人完成物体的夹取、运

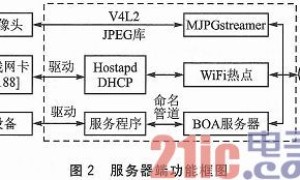
基于ARM-Linux多功能机器人的设计,摘要:针对目前机器人技术普遍存在的成本高、功耗大、实时性差的缺点,采用性能高、成本低、功耗低的S3C2440芯片作为核心处理器,移植实时性较高的Linux操作


说起对工业机器人的性能要求,无非就是“快、准、狠”三字。其实这也就是对机器人关节伺服电机的要求,今天我们就来拆解一下这三字背后的含义。其中&ldqu
在大多数汽车制造厂中,我们都能够看到利用自动机器人技术进行负重托举和部件组装的身影。这种情况下,精度成为了一个十分关键的因素,因为电机、机器人手臂、开关和高压设备都必须像交响乐一样保持协调
以STM32F103为核心的智能灭火机器人,摘要:设计了一种能顺利完成在模拟房间内自动灭火任务的智能灭火机器人。方案以STM32F103嵌入式芯片为控制核心,采用传感器组采集环境信号,控制机器人行动。
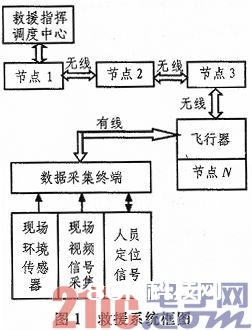
煤矿事故的应急救援根据事故灾害的类型、事故可能引起的破坏程度和事故地点的实际环境采取相应救援方案和救援装备,达到真正的应急救援效果。目前,已经研制成功的救援机器人主要有多履带式机器人、腿轮式机器人、蛇


机器人技术和人工智能对工作、对社会到底将有多少影响?人工智能已经入侵到我们的日常生活中,不是从「机器人猎豹」开始。实际上,它从很久前就开始了;虽然接触边缘小,但是足够深远。
