


在现代机器人设计中,头部、颈部、四肢的任何活动都需要各种各样电机的支持,如传统的旋转电机、步进电机、直线电机和其它特殊电机,但这些电机的驱动和控制要求各有不同,如何实现各种电机的精确控制解决方案?如何
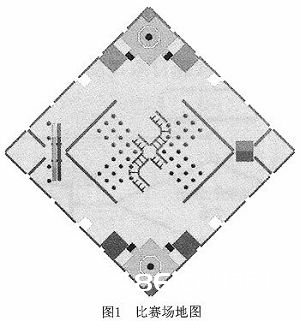
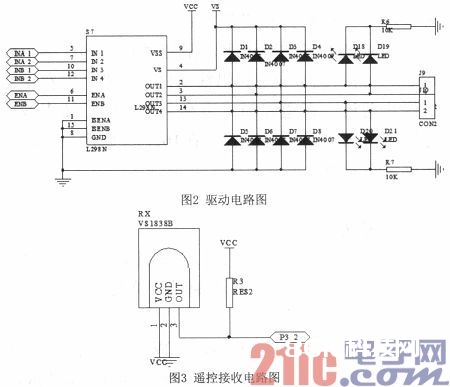
摘要:文章主要通过对2014年华北五省机器人大赛中机器人DOTA对抗赛中无线遥控对抗机器人进行分析和研究,介绍了两种红外无线遥控进攻机器人和一种全自主防守机器人通讯和击打装置的设计和实现,使其能根据操
在中国科大首届机器人舞蹈比赛中(中央10台节目转播),我们用一个单片机控制多个步进电机指挥跳舞机器人 的双肩、双肘和双脚伴着音乐做出各种协调舒缓充满感情的动作,荣获一等奖。电路采用74373锁存,74
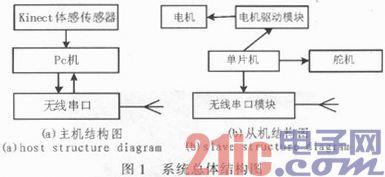
摘要:设计一款可以通过人体动作对机器人进行控制的机器人控制系统。该系统由主机和从机两部分组成,通过Kinect体感传感器采集人体动作信息,在主机中进行图像处理解析出相应的人体动作,然后通过无线传输单元
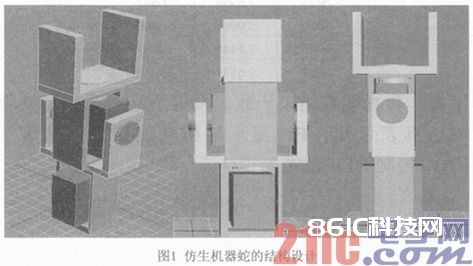
摘要:文章主要描述仿生机器蛇的设计,包括机器蛇的结构设计和运动规划连贯动作的实现。通过对蛇形机器人在有障碍物和无障碍物环境中,进行不同连贯动作的运动规划和运动形式变化,找出机器人设计的不同侧重点;最后

自动化车间是未来工业发展的趋势,而采用机器人生产则是这种自动化的集中体现。在本文中,Geseke 的Druckguss Westfalen 公司就通过使用徕斯机器人的自动化系统,使其达到了节能的效果
0 引言自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防、探索等领域。近年来机器人的智能水平不断提高,并迅速改变着人们的生活方式。人们在不断探索、改造、认识自然的过程
随着科学技术的日新月异及传感器技术的不断发展,各国对智能移动机器人的研制和开发力度也不断加大,各式各样的机器人进入社会生活的方方面面。机器人可以代替人力进行许多具有一定危险性的活动,进入一些人类难以涉
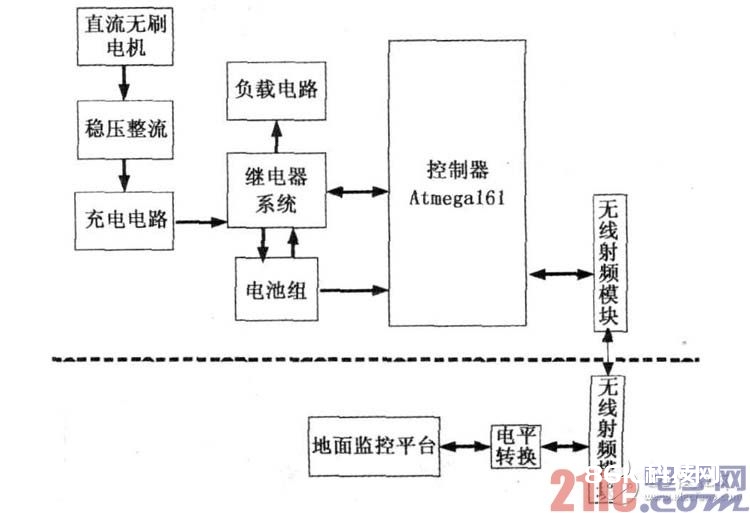
由于在民用及国防等诸多领域中的广泛应用, 空中机器人技术已经越来越被人们所重视, 并吸引了各国专家学者的注意。小型旋翼机器人是以模型直升机为载体, 装备上传感器单元, 控制单元和伺服机构等装置以实现
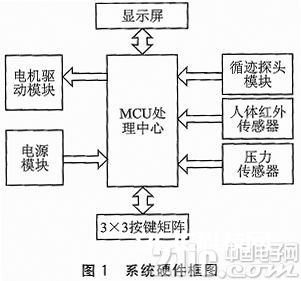
智能服务机器人正在融入群众的生活,它们的出现解决了很多问题,首先就是节约成本、节省劳动力。餐饮智能化给人们带来的好处是降低成本、管理便利。基于此,本文设计了一种寻轨式语音播报送餐机器人来实现送餐收盘,
