基于超声波避障技术是建立在获取机器人前方障碍物的距离和位置信息上,故超声波避障技术主要运用超声波传感器,根据超声波测距原理,结合矩阵式结构设计理念的数据融合对机器人前方障碍物的距离和位置进行定位。超声

摘要:为了实现对水下机器人周围环境的监测,提出了一种基于PC104与C8051F120的水下机器人环境监测系统设计方案,并完成系统的软硬件设计。该系统的硬件部分主要是采集下潜深度传感器、姿态传感器、温
1 引言作为一种数字伺服执行元件,步进电机具有结构简单、运行可靠、控制方便、控制性能好等优点,广泛应用在数控机床、机器人、自动化仪表等领域。为了实现步进电机的简易运动控制,一般以单片机作为
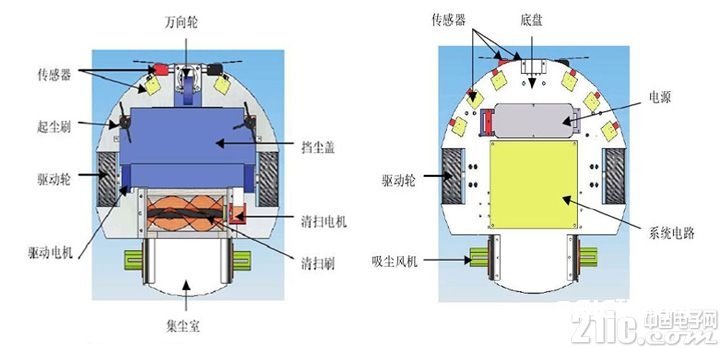
在智能家居中,扫地机器人将是必不可少的成员,而扫地机器人则要求更智能化;高效率是要求的一方面,最好能达到自动导航。目前,有多种扫地机器人在市面销售,在效率和效果方面有所欠缺。该文介绍了角速度传感器XV
机器人软件架构是典型的控制回路的层次集, 包含了高端计算平台上的高级任务规划、运动控制回路以及最终的现场可编程门阵列(FPGA)。 在这中间,还有循环控制路径规划、机器人轨迹、障碍避让和许多其他任务


服务机器人以服务为目的,因此人们需要一种更方便、更自然、更加人性化的方式与机器人交互,而不再满足于复杂的键盘和按钮操作。基于听觉的人机交互是该领域的一个重要发展方向。目前主流的语音识别技术是基于统