


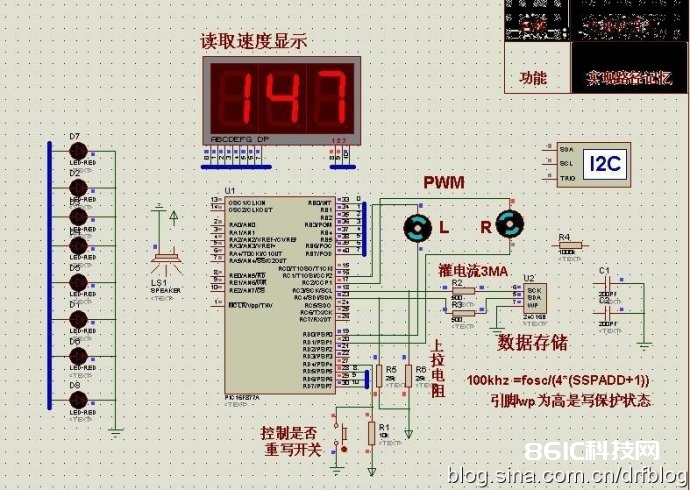
利用24CXXX系列E2PRAM存储器实现机器人的路径记忆。首先,利用PIC16F877A单片机将机器人的路径采集转换成数据,单片机进行处理。但是,

;机器人代码:(外部中断用来接红外传感器的)ORG0000HJMPINITORG0003HJMPINT_0ORG000BHJMPINT_TORG0023HJMPINT_S;——-

【超声波测距模块】-【机器人的耳朵】includeavrioh>includeavriom16h>includeutildelayh>intmain(void){DDRA=0x00;
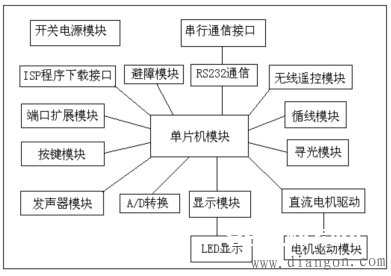

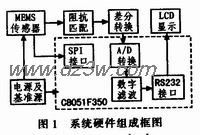
1引言机器人巡线是指用机器人携带检测通信仪器沿全线路行驶作业,并由机器人完成对线路运行故障的检测和对安全事故隐患的巡视,并将所检测的信息实时向地面传送,由地面进行分析处理。在常规地面运作时,一般采用小
