机器人传感器的类别及应用原理-一般机器人系统由机械手、环境、任务和控制器四个互相作用的部分组成。我们称一般安装在机器人机械手上的传感器为内传感器(Inner Sensons),而称作为环境的一部分的传感器为外传感器(External Sensons)。下面将以此为主,结合机器人传感器其它分类方法进行阐述。
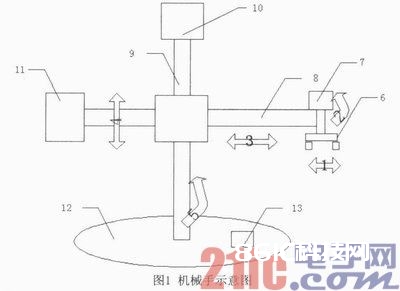
摘要:基于S7—200PLC村机械于的运动进行一系列控制,这些运动包括手臂上下、左右直线运动,手腕旋转运动,手爪夹紧动作和机械手整体旋转运动等。所采用的动力机构是步进电机,能够做到精确控制
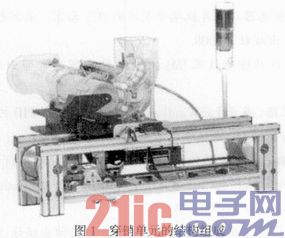
摘要:本文首先介绍了PLC在柔性制造系统穿销机械手的应用,其次阐述了加盖机械手的组成及控制流程。从PLC的控制原理角度,设计了穿销机械手控制流程图、电源系统图、PLC的I/O接口设计及它们的地址分配,
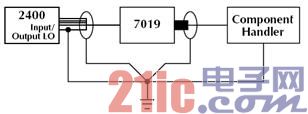
噪声在生产环境下,电子噪声是一个严重的问题。荧光灯、机械装置以及相当于天线的大面积金属物品,例如元件机械手和其它一些噪声源,都会在测量电路中感应出很低的电压。要想将这些噪声影响降至最低,所有的测量引线


TOP1危险品处理机器人控制电路设计本文首先简要介绍了危险品危险品处理机器人的作用,机械手的结构形式,着重从控制系统与硬件设计介绍了危险品处理机器人机械手控制系统的设计与实现。最后给出了测得的机械手.