



通过利用FPGA协处理器实现对汽车娱乐系统进行优化设计-集成了数据通信,定位服务和视频娱乐的高端汽车信息娱乐系统需要高性能的可编程处理技术,其最佳实现方法是在主流汽车信息通信系统构架中集成FPGA协处理器。本文讲述汽车娱乐系统的需求,讨论主流系统构架,以及FPGA协处理器是如何集成到软硬件体系中,以满足高性能处理、灵活性和降低成本的要求。
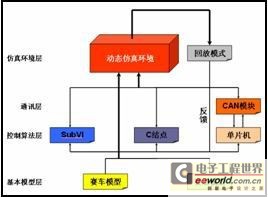
本仿真系统基于LabVIEW虚拟仪器技术开发完成,用于智能车的算法仿真及分析。1基本构架图1是整个仿真系统的构架图,主要分为基本模型层、控制算法层、通讯层以及仿真环境层。基本模型层包括赛车模型与赛道模
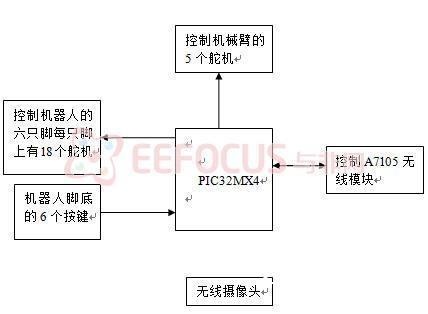
本设计通过以MIPS构架的PIC32单片机实现对仿生六足机器人基本步态控制,使机器人可按照典型步态协调灵活运动。该六足机器人前进一步的最大距离是8CM 。一次拐弯的最大角度为30度。机械臂夹起来的重物

/*****************************************************一个uCOS ARM系统的启动过程分析及系统构架。 **Main 函数的代码如下: ****

利用AVR单片机的TWI(Two-Wire Serial Interface)总线构建了智能机器人系统的模块化构架。利用TWI总线实现了主控模块与扩展模块之间的双向多字节通信,介绍了软件编程方法,可

引言LPC11Cx系列是NXP公司的高性价比Cortex—M0构架ARM微控制器产品,内嵌CAN总线控制器。CAN总线位定时参数决定CAN总线能否按给定速率正常通信及其稳定性,但在实践中发
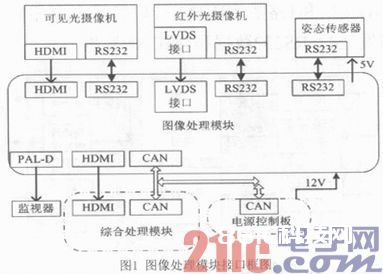
摘要:介绍了一种基于DM648和FPGA构架的图像处理方案,阐述了图像处理模块的组成原理和结构,并对模块内部电路设计和FPGA内部图像处理逻辑进行了重点介绍。木文设计的图像处理模块能够支持对高清视频图
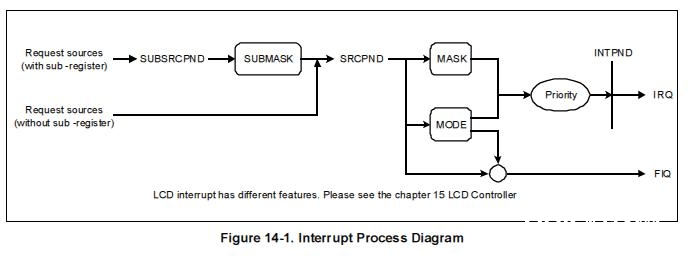
硬件篇:S3C2440是arm920T架构,先温习一下s3c2440中的中断控制器原理和相关硬件构架。中断控制器(InterruptControler):S3c2440A的中断…
