



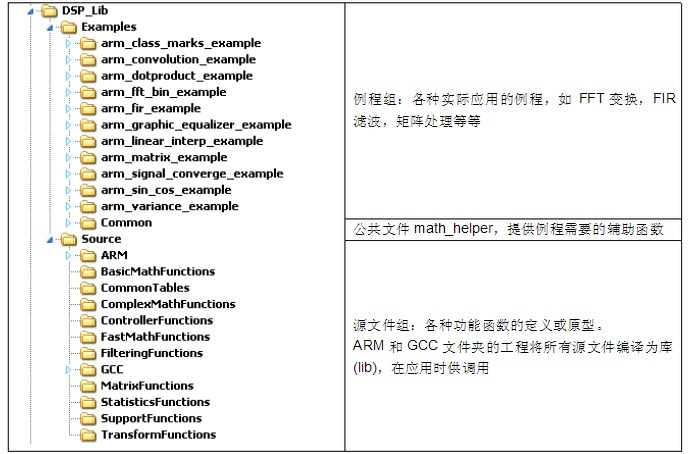
STM32-F4属于Cortex-M4F构架,这与M0、M3的最大不同就是具有FPU(浮点运算单元),支持浮点指令集,因此在处理数学运算时能比M0M3高出数十
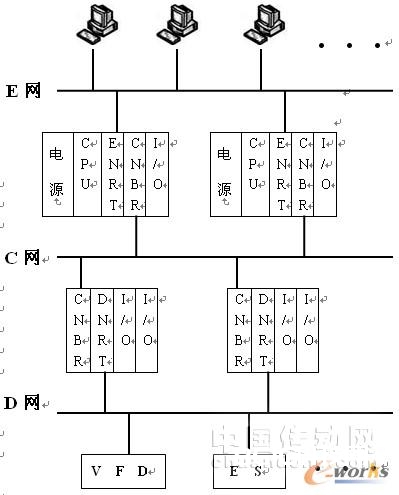
1概述宣钢110t转炉采用了基于ControlLogix系统的NetLinx开放式网络构架,用三层网络实现转炉及公用部分PLC、操作站、服务器之间数据共

我们采用LabVIEW与NI射频模块化仪器为构架的DFS测试与报告制作解决方案,设计协助测试各种不同雷达波段需求的无线产品。使用NI射频模块化仪器,在射频信号生成与测量速度方面,我们降低了成本,同时提

设计了一种全新构架的高性能数据采集系统。采用平衡式双通道对称结构,可对32路输入信号进行灵活控制。系统中采用了高速A/D转换器、大容量的FIFO SRAM、CPLD技术和PCI数据通信接口,实现了实时
基于极具突破性的新型CPLD架构,MAX® II器件重新定义了CPLD的价值定位。传统意义上,CPLD由基于宏单元的逻辑阵列块(LAB)和特定的全局布线矩阵组成。对于基于宏单元的构架,随着逻辑密度的增
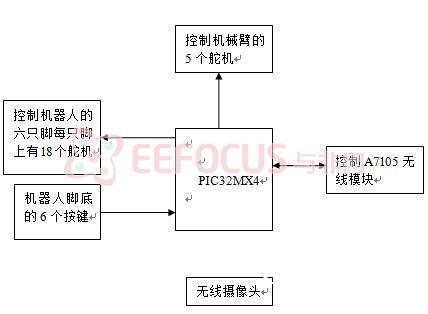
本设计通过以MIPS构架的PIC32单片机实现对仿生六足机器人基本步态控制,使机器人可按照典型步态协调灵活运动。该六足机器人前进一步的最大距离是8CM 。一次拐弯的最大角度为30度。机械臂夹起来的重物

本文在研究IMS网络架构以及应用协议、业务构架的基础上,对于IMS的引入时的一些问题进行了分析和探讨,主要包括:IMS的引入方式、IMS的引入对已有网络的影响、IMS对终端的要求以及IMS和软交换、N

电动汽车动力电池BMS的核心技术分析-最近看到国内某企业的宣传牌,因为采用AUTOSAR的软件构架这样的底层软件而声称“全面掌握BMS软硬件技术”、“达到世界先进水平”、“采用多重均衡控制能力”。很能
