



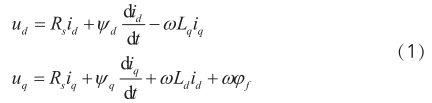
王 卫,阳鹏飞,陈 瀚(湖南工业大学 电气与信息工程学院,湖南 株洲 412008)摘 要:对于在永磁同步电机(PMSM)中无传感器控制技术调速范围具有局限性,提出了一种结合滑膜观测器法和高频
王远洋 王 卫(湖南工业大学 电气与信息工程学院,湖南 株洲 412008)摘 要:为了改善低线数码盘的测速精度及码盘固有的相位滞后问题,提出了一种基于状态观测器的速度观测算法。该算法以电机

孙希凤,秦斌,王欣(湖南工业大学,湖南 株洲 412000)摘 要:由于传统带位置传感器直流电机容易受到外界的影响、体积较大且电机运行时电刷与换向器摩擦造成损耗会减少电机寿命,为了减小位置传感
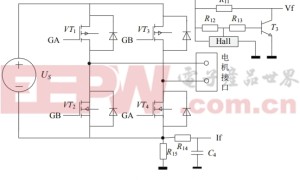
徐敬成1,凌 云2(1. 江苏省溧水中等专业学校,江苏 南京 211200;2. 湖南工业大学,湖南 株洲 412007)摘 要:为避免无刷直流电机在换相时因上下桥臂直通而造成电源和开关器

目云奎,陈 玄(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)摘 要:针对如何改善永磁同步电机(PMSM)控制性能,采用一种基于永磁磁链在线观测的滑模调速方法。首先,采用基于
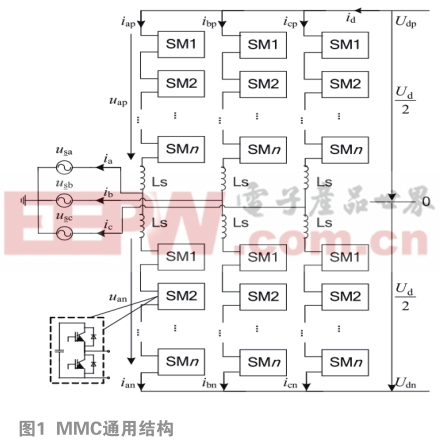
阳鹏飞(湖南工业大学,湖南 株洲 412008)摘要:当代传统的二、三电平变换器已不能满足高电压,大容量光伏并网系统的要求,而模块化多电平换流器(MMC)因具有易扩展、功率器件容量大、谐波

王 卫,阳鹏飞,陈 瀚(湖南工业大学 电气与信息工程学院,湖南 株洲 412008)摘 要:对于在永磁同步电机(PMSM)中无传感器控制技术调速范围具有局限性,提出了一种结合滑膜观测器法和高频
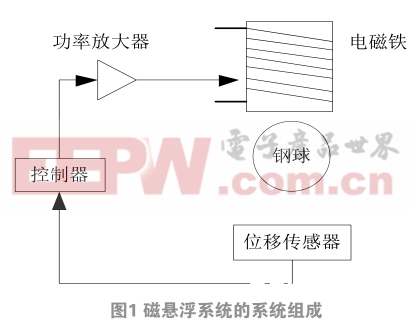
李亚琦,秦 斌,王 欣 (湖南工业大学 电气与信息工程学院,湖南 株洲 412008)摘 要:研究了磁悬浮小球系统的控制问题,为了解决传统PID控制方法在磁悬浮小球控制过程中调节效果不理想,鲁
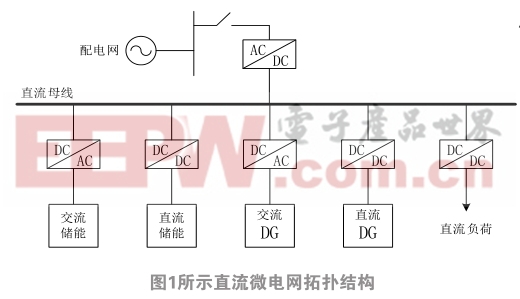
董翰林,张晓虎(湖南工业大学电气与信息工程学院,湖南 株洲 412008)摘 要:为了提高直流配电网中直流母线电压的电能质量,根据带死区的下垂控制思想,提出了一种将恒压控制和虚拟惯性控制相结合
王远洋 王 卫(湖南工业大学 电气与信息工程学院,湖南 株洲 412008)摘 要:为了改善低线数码盘的测速精度及码盘固有的相位滞后问题,提出了一种基于状态观测器的速度观测算法。该算法以电机
