


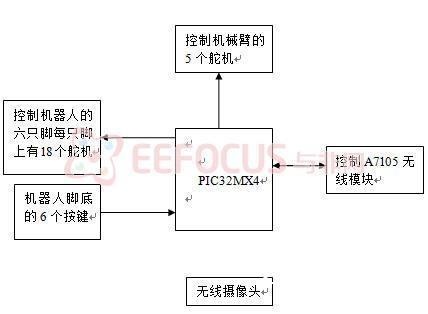
本设计通过以MIPS构架的PIC32单片机实现对仿生六足机器人基本步态控制,使机器人可按照典型步态协调灵活运动。该六足机器人前进一步的最大距离是8CM 。一次拐弯的最大角度为30度。机械臂夹起来的重物

所谓生物识别技术就是,通过计算机与光学、声学、生物传感器和生物统计学原理等高科技手段密切结合,利用人体固有的生理特性,(如指纹、脸象、虹膜等)和行为特征(如笔迹、声音、步态等)来进行个人身份的鉴定。生
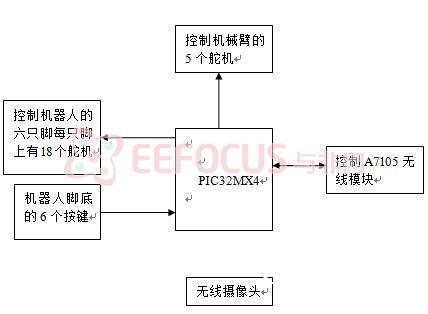
本设计通过以MIPS构架的PIC32单片机实现对仿生六足机器人基本步态控制,使机器人可按照典型步态协调灵活运动。该六足机器人前进一步的最大距离是8CM 。一次拐弯的最大角度为30度。机械臂夹起来的重物


本站为您提供的生物识别技术除了指纹识别还有什么?,所谓生物识别技术就是,通过计算机与光学、声学、生物传感器和生物统计学原理等高科技手段密切结合,利用人体固有的生理特性,(如指纹、脸象、虹膜等)和行为特征(如笔迹、声音、步态等)来进行个人身份的鉴定。
