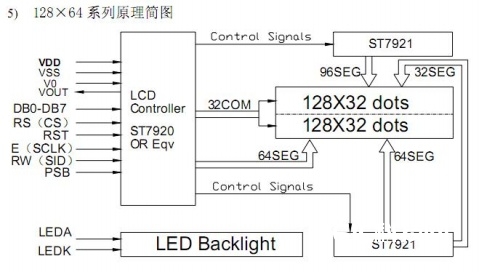
基于STC12C5616AD单片机的操作指示器电路设计工作原理-分享到 火箭炮能否迅速展开火力打击是衡量其武器系统作战性能的重要因素。火箭炮在对目标实施准确打击之前,必须对其进行精确的调平。目前,部队在对火箭炮 车体平台 进行调平时,调平过程复杂,协调要求高。调平过程通常需要三个人配合完成,一人站在梯子上观察放于回转盘水准仪检查座上的水准仪,两人位于车下手动操作两个千斤顶,一般要经过多次调试才能完全使车体纵横向水平。检查调整完后,若车体水平发生变化,又要重复以上调

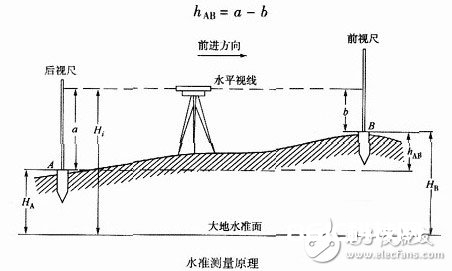
大众化的倾角传感器水准仪-水准仪是通过建立水平视线测定地面两点间高度差的仪器。测量的原理是利用水准仪提供的水平视线,借助带有划分的水准尺,直接测定地面两点间的高度差,然后根据已知点高度和测得的高度差,推算未知点高度。由于在进行实地测量时,测量所处的地点并不能保证是处于水平状态,测量之前需要通过水准器对水准仪进行水平调节,确保是进行水平方向上的高度差测量。然而在水平调节过程中往往操作起来过程繁琐,因此可以利用倾角传感器来进行水平调节。

湿度传感器的分类及功能特点解析-湿度传感器的精度应达到±2%~±5%RH,达不到这个水平很难作为计量器具使用,湿度传感器要达到±2%~±3%RH的精度是比较困难的,通常产品资料中给出的特性是在常温(20℃±10℃)和洁净的气体中测量的。在实际使用中,由于尘土、油污及有害气体的影响,使用时间一长,会产生老化,精度下降,湿度传感器的精度水平要结合其长期稳定性去判断,一般说来,长期稳定性和使用寿命是影响湿度传感器质量的头等问题,年漂移量控制在1%RH水平的产品很少,一般都在±2%左右,甚至更高。
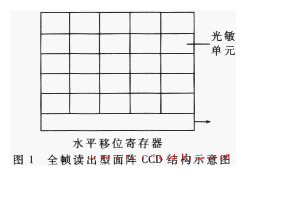
全帧读出型面阵CCD光电传感器的工作原理及应用-CCD的光敏单元在光照时间内进行光电转换,各单元随光照强度不同积累电荷量亦不同。在无光照期间,各光敏单元信号依次被读出。读出时,面阵中的各行信号均向下一行移动,在最下行的信号移出光敏感区后进入水平移位寄存器。这时将水平移位寄存器中的信号依次移出即可供显示及处理。按上述方法,将各行信号依次移出后,再进行曝光,再移出,这样就可以得到一帧一帧的连续的图像信号。
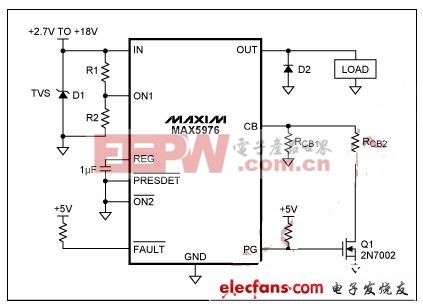
某些负载在启动期间比工作时需要更大的电流;有些负载则可在启动期间将电流限制到较低的功率水平,但在工作期间需要较大的电流。本文介绍的应用电路在完成启动后可以自动调高或调低功率电路的过流保护水平。在电

LED具有体积小,耗电量低、长寿命环保等优点,在实际生产研发过程中,需要通过寿命试验对LED芯片的可靠性水平进行*价,并通过质量反馈来提高LED芯片的可靠性水平,以保证LED芯片质量。 1、引言作为


环境监测是通过对人类和环境有影响的各种物质的含量、排放量的检测,跟踪环境质量的变化,确定环境质量水平,为环境管理、污染治理等工作提供基础和保证。简单地说,了解环境水平,进行环境监测,是开展一切环境工作