


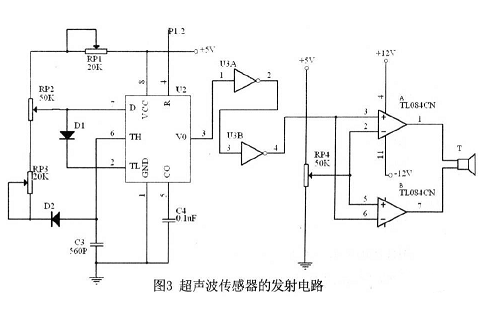
基于AT89S52单片机的超声波信号发射与接收电路设计-本设计的整体框图如图所示,主要由超声波发射,超声波接收与信号转换,按键显示电路与温度传感器电路组成。超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差T,然后求出距离S=CT/2,式中的C 为超声波波速。在常温下,空气中的声速约为340m/s。由于超声波也是一种声波,其传播速度C与温度有关,在使用时,如果温度变化不大,则可认为声速是基本不变的。

如何在单片机中实现快速开平方的算法-我们先来看看10进制下是如何手工计算开方的。
先看下面两个算式,
x = 10*p + q (1)
公式(1)左右平方之后得:
x^2 = 100*p^2 + 20pq + q^2 (2)
现在假设我们知道x^2和p,希望求出q来,求出了q也就求出了x^2的开方x了。
我们把公式(2)改写为如下格式:
q = (x^2 – 100*p^2)/(20*p+q) (3)
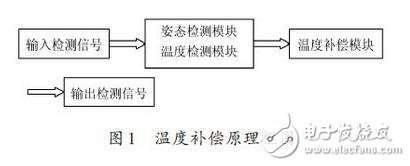
基于MEMS姿态传感器温度补偿方法-基于MEMS姿态传感器主要用于载体姿态的调整和倾角的检测,但是由于工作环境温度的改变,就会导致测量精度的变化,在一些高精度检测的要求下,则失去其检测的效果,所以必须采取相应措施来消除或者减少随温度变化而引起的误差,即必须对传感器进行温度补偿。##以参数m为因变量,温度t为自变量,根据曲线拟合式mt=at2+bt+c ,利用Matlab求出a,b,c的值,最终确定m与t的函数关系式。
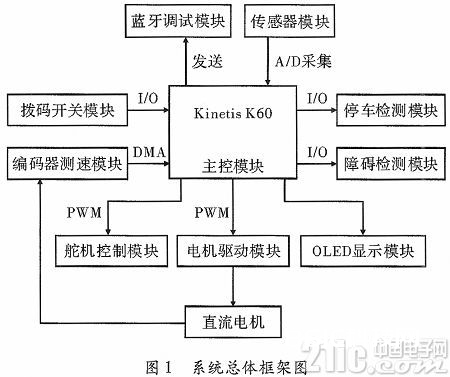
摘要:为了实现智能小车稳定快速的自动寻线,采用了“五横二竖加八字”排列的电磁线圈,能识别各种复杂的赛道。通过三次函数算法求出偏差,并采用差速电机算法处理弯道,实现了电磁导航的功
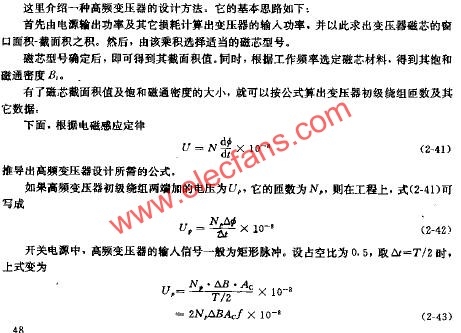
这里介绍一种高频变压器的设计方法:它的基本思路如下;首先由电源输出功率及其它损耗计算出变压器的输入功率,并以此求出变压器磁芯的窗口面积-截面积之积。然后,由该乘积选择使用的磁芯型号。…

1前言三坐标测量机测量原理就是将被测物体置于三坐标测量空间,可获得被测物体上各测点的坐标位置,根据这些点的空间坐标值,经计算求出被测物体的几何尺寸和形状。经过与CAD设计模型的比对,可以检测加工零件的

对于任何周期信号,U1100可用前述的时间间隔的测量方法,先测定其每个周期的时间T,再用下式求出频率。例如示波器上显示的被测波形,一周期为8div,“t/div”开关置“1t/S”位置,其“微调”置“

接上篇2.2 计算错误位置多项式[4]在上一步的伴随式的计算中,若 Si 的值不全为0,则 表示信息在传输过程中发生了错误,需要求出错误位置多项式,有关关键方程[4-5]这里不再赘述,设位置多项式为:
