


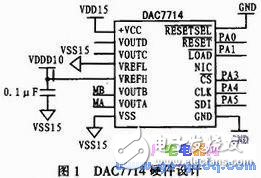
基于DAC7714的嵌入式激光跟踪仪设计-在基于AT91RM9200处理器的某嵌入式激光跟踪仪中,为了实现目标的快速、平稳跟踪,需要控制两路电机,即:方位电机、俯仰电机。其原理如下:通过不断读取两路角度编码器的数据,计算出两路电机实际角度与期望角度的偏差,利用反馈控制的原理,驱动两路电机跟踪目标。两路电机的控制电压为5V时,电机停止不动;控制电压为0V时,电机以最大速度顺时针旋转;控制电压为10V时,电机以最大速度逆时针旋转。
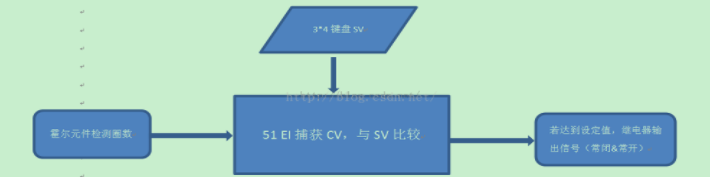
转轮电机控制系统的圈数检测-大致功能要求就是检测转轮的圈数,和设定值相比较,当前值和设定值相同即控制继电器停止电机。考虑到轮子转动的惯性问题,所以添加一个1602显示当前值和设定值,直观明了。
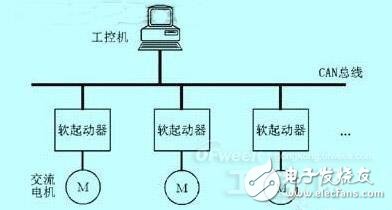
大神告诉你:基于单片机的多电机软起动系统-随着国民经济的飞速发展,交流电动机在工业生产中扮演了极为重要的角色,作为各行业中的主要拖动电机,应用更为广泛。众所周知,交流电动机在全压起动时,起动电流达到额定电流的5~7倍,会对电网造成冲击;起动转矩约为额定转矩的2倍,加剧机械结构磨损。

舵机DS3115的组成和工作原理介绍-一般来讲,舵机主要由以下几个部分组成, 舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。 工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲),控制电机 转动 ,电机带动一系列齿轮组,减速后传动至输出舵盘。

STC单片机的特性及缺点解析-STC单片机是高速、低功耗、超强抗干扰的新一代8051单片机51单片机,指令代码完全兼容传统8051,但速度快8-12倍,内部集成 MAX810专用复位电路。4路PWM 8路高速10位A、D转换,针对电机电机的供应商控制,强干扰场合,成为继51单片机后一个全新系列单片机。

如何采用51单片机控制电机的旋转角度?-typedefunsignedcharuchar;
typedefunsignedintuint;
typedefunsignedlongulong;
ucharcodebeatCode[8]={
0xE,0xC,0xD,0x9,0xB,0x3,0x7,0x6
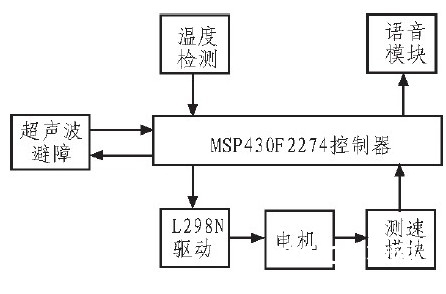
基于MSP430F2274单片机对智能小车的应用设计-该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。

C51单片机在电机转速测量仿真系统中的设计-该单片机电机转速测量系统仿真仿真采用测频法“M法”测量电机转速。即在一定测量时间T内,测量脉冲发生器(替代输入脉冲)产生的脉冲数m1来测量转速,计算式如下:n=60m/TP,式中:P-为转轴转一周脉冲发生器产生的脉冲数;n-转速单位:(转/分);T-定时时间单位:(秒)。
单片机中如何实现多线程-整个项目需要控制16台步进电机,21个电磁阀,3个泵,1个直流电机,系统要求全部执行时间为6秒钟,系统要求步进电机以其最快的速度—–40us—60us打拍。如果以单线程的方式编程让一台电机转到位之后,再转其他电机。这样16台电机打一拍就需要640us—960us已经无法满足系统要求。这就需要使单片机并行控制多台电机运转。这种以并行的方式驱动各个电机同时启动可以在最短的时间将各个电机同时到位。在转动电机的同时还需要检测一些开关量已确定电机的位置。
电动汽车电机控制器相关知识普及-电机控制器,作为电动汽车的核心部件之一,是汽车动力性能的决定性因素。它从整车控制器获得整车的需求,从动力电池包获得电能,经过自身逆变器的调制,获得控制电机需要的电流和电压,提供给电动机,使得电机的转速和转矩满足整车的要求。
