


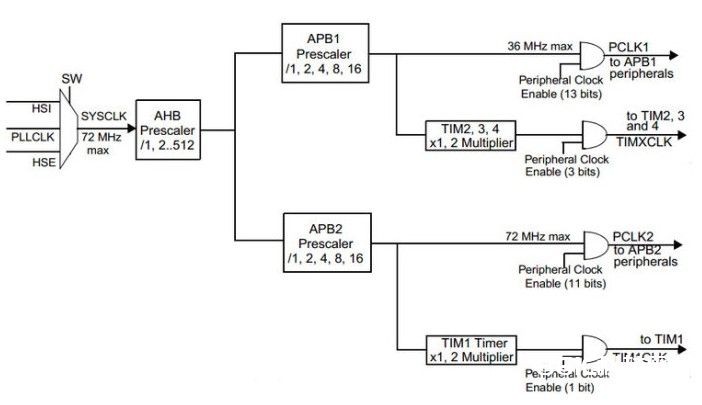
STM32通用定时器TIM2的使用方法解析-STM32中一共有11个定时器,其中2个高级控制定时器,4个普通定时器和2个基本定时器,以及2个看门狗定时器和1个系统嘀嗒定时器。(TIM1和TIM8是能够产生3对PWM互补输出的高级登时其,常用于三相电机的驱动,时钟由APB2的输出产生;TIM2-TIM5是普通定时器;TIM6和TIM7是基本定时器,其时钟由APB1输出产生)
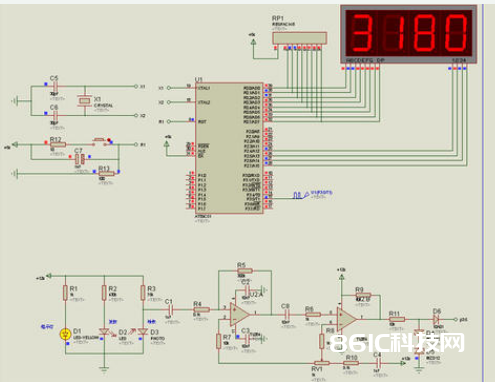
8031单片机对电机转速的测量设计-然后利用DA0832将电机上的传感器配合DA0832的CKMOT接口将脉冲信号接到8031的INT0,利用外中断实现速度的测量,一次外中断会使速度计数器自动加一,利用定时器产生一秒的计时,得出一秒内速度计数器的值就可以得到电机的转速。另定时计数器每250MS产生一次定时器中断,利用中断来检测是否有新的控制信号输入,以达到实时控制转速的目的。

C51单片机对步进电机正反转的控制设计-{
while(–i);
}
main()
{
unsignedchari;
while(1)
{
for(i=0;i《4;i++)//4相
{
p1=f_rotation[i];//输出对应的相可以自行换成反转表格
delay(10000);//改变这个参数可以调整电机转速
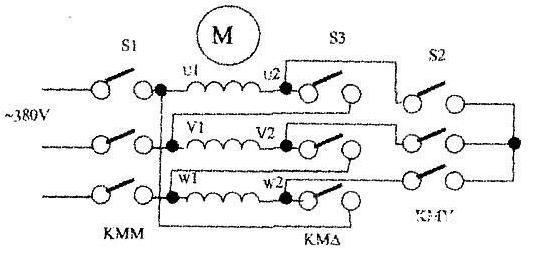
51单片机对三相星形电机的控制设计-当按下SB1键时,电机进入预启动状态,经30s短延时后进入正式启动,且不管电路工作在何种状态,只要按下SB2电机就停止,再按SB1电机又重新启动,并要求具有30s倒计时显示及电路状态显示。
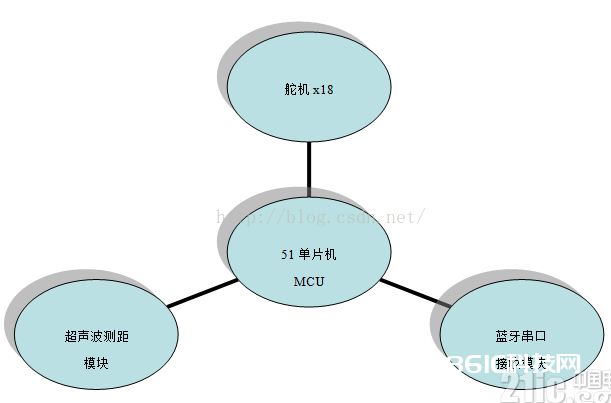
51单片机对六足机器人的控制设计-控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。舵机的控制信号周期为20MS的脉宽调制(PWM)信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0-180度,呈线性变化。

STM32单片机通用定时器的编程设计-STM32系列的CPU,有多达8个定时器,其中TIM1和TIM8是能够产生三对PWM互补输出的高级定时器,常用于三相电机的驱动,它们的时钟由APB2的输出产生。其它6个为普通定时器,时钟由APB1的输出产生。
STM32单片机实现直流减速电机控制的程序设计-在直流减速电机控制中,最常用的方法就是通过PWM来控制直流电机的转速。在控制小车走直线的过程中,需要两者的转速一置(如果要走得很直,还需要在短时间内保证两者的行程大致相当,这可以用PID算法来控制)。
基于AT89S52单片机的电动机节电器控制设计-根据三相电机功率公式P – Ulcos}P,要降低功率消耗可以通过减少电机的U,I和cos }P来实现。由于在降低电压,减少励磁电流(电机的电流主要是励磁电流)的同时,功率因数会上升,因此功率上升的幅度要小于电流降低的程度,才能实现节能。
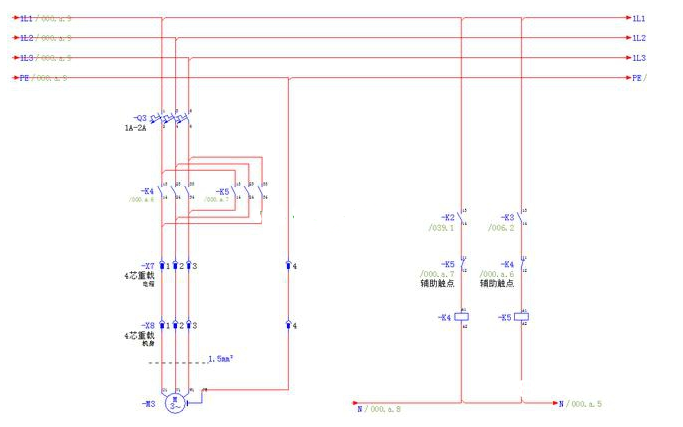
电机正反转互锁控制的软硬件实现-电机正转时K2吸合,K5辅助触点常闭导通,K4线圈得电,K4触点吸合,电机开始正转。同时K4常闭辅助触点断开,反转回路无法导通。实现保护的目的。反转也是同理。
