


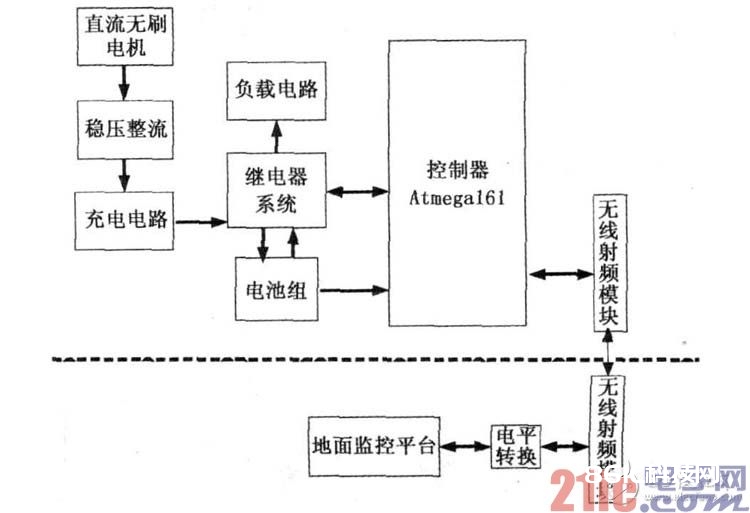
由于在民用及国防等诸多领域中的广泛应用, 空中机器人技术已经越来越被人们所重视, 并吸引了各国专家学者的注意。小型旋翼机器人是以模型直升机为载体, 装备上传感器单元, 控制单元和伺服机构等装置以实现
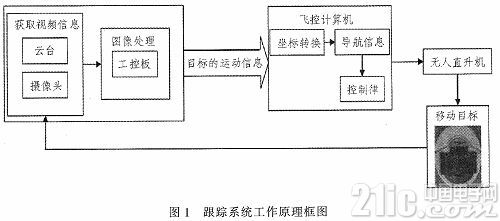
摘要:实现无人直升机对移动目标的跟踪是一个较难的技术,针对这个问题,本文基于计算机视觉对无人直升机移动目标跟踪技术进行了研究。首先,设计了无人直升机跟踪移动目标的总体方案;其次,提出了一种快速识别定位
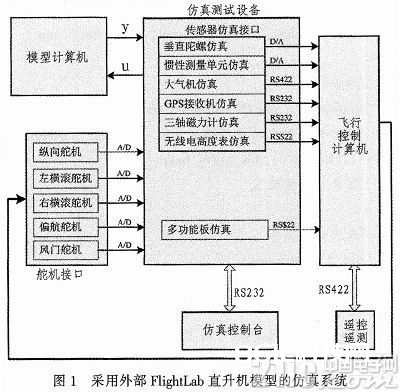
摘要:为了配合飞行控制系统的设计和开发,本文设计了一种基于线性化直升机数学模型的半物理仿真系统。重点讲述了仿真系统的系统结构以及各个组成部分的功能,描述了线性化直升机仿真模型的基本原理和实现过程,并以
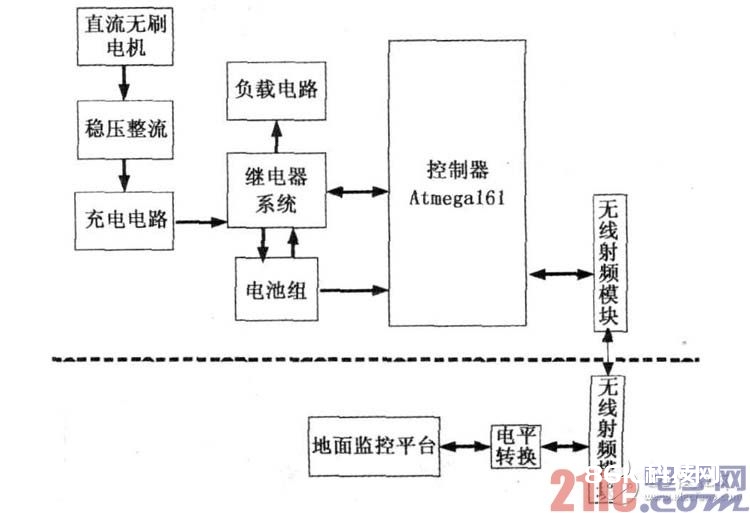
由于在民用及国防等诸多领域中的广泛应用, 空中机器人技术已经越来越被人们所重视, 并吸引了各国专家学者的注意。小型旋翼机器人是以模型直升机为载体, 装备上传感器单元, 控制单元和伺服机构等装置以实现

导读:本文主要介绍的是直升机发动机的原理,感兴趣的童鞋们快来学习一下吧~~很涨姿势的哦~~1.直升机发动机原理–简介直升机的动力装置大体上分为两类,即航空活塞式发动机和航空涡轮轴发动机。在直
