


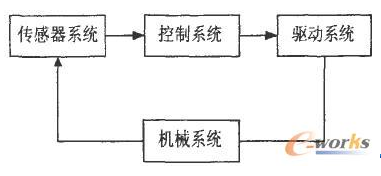
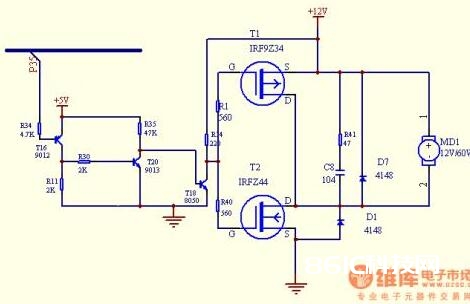
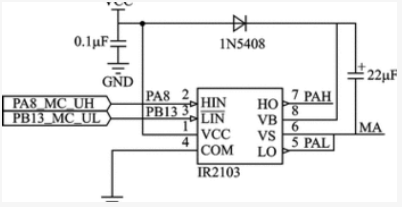
基于C8051F313直流无刷电机转子位置的检测-这部分电路实际上完成电机换相驱动和调速的功能。C8051F313根据转子位置检测电路的检测结果,对无刷直流电机进行实时的换相驱动,同时根据转速检测电路检测到的转速对无刷直流电机进行调速。本设计采用PWM方式对电枢电压进行控制,实现调速。

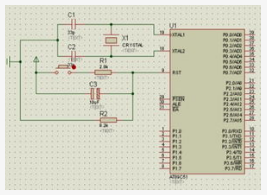
基于AT89C51单片机直流电机PWM调速程序分享-这是一款AT89C51单片机直流电机PWM调速程序,程序可以直接用于AT89C52、AT89S51、AT89S51,STC89C51、STC89C52单片机中,单片机晶振采用11.0592M,直流电机由L298集成电路控制,产生的PWM的频率约为91Hz。
单片机中如何实现多线程-整个项目需要控制16台步进电机,21个电磁阀,3个泵,1个直流电机,系统要求全部执行时间为6秒钟,系统要求步进电机以其最快的速度—–40us—60us打拍。如果以单线程的方式编程让一台电机转到位之后,再转其他电机。这样16台电机打一拍就需要640us—960us已经无法满足系统要求。这就需要使单片机并行控制多台电机运转。这种以并行的方式驱动各个电机同时启动可以在最短的时间将各个电机同时到位。在转动电机的同时还需要检测一些开关量已确定电机的位置。
单片机对直流电机的调速测试程序设计-DCBITP1.0
speedequ20h
org000h
jmpdc_MOTOR
ORG100H
dc_MOTOR:
MOV a,p1
MOV speed,a;键盘去抖动
lcalldel
MOV a,p1
cjnea,speed,dc_MOTOR
JBP3.3,JUD_SPD5
MOV SPEED,#6;SW1
JMPPWM
JUD_SPD5:JBP3.2,JUD_SPD4
MOV SPEED,#5;SW2
JMPPWM
JUD_SPD4:JBP3.1,JUD_SPD3
基于PIC单片机的直流电机测速程序设计-u通过模式选择位CCPxM3:CCPxM0(CCPxCON《3:0》)选择事件类型。当一个捕捉发生时,中断请求标志位CCPxIF置1,它必须用软件清零。如果在读取寄存器CCPRx之前发生了另一个捕捉,那么之前捕捉的值将被新捕捉的值覆盖。
STM32单片机实现直流减速电机控制的程序设计-在直流减速电机控制中,最常用的方法就是通过PWM来控制直流电机的转速。在控制小车走直线的过程中,需要两者的转速一置(如果要走得很直,还需要在短时间内保证两者的行程大致相当,这可以用PID算法来控制)。

直流电机VHDL源代码-SIGNAL C: STD_LOGIC_VECTOR(3 DOWNTO 0);
SIGNAL A: STD_LOGIC_VECTOR(3 DOWNTO 0);
SIGNAL CODE: STD_LOGIC_VECTOR(2 DOWNTO 0);
SIGNAL Bcd:STD_LOGIC_VECTOR(23 Downto 0);
换向方式研究无位置传感器无刷直流电机-传统的永磁无刷直流电机均需一个附加的位置传感器,用以向逆变桥提供必要的换向信号。它的存在给直流无刷电机的应用带来很多不便:首先,位置传感器会增加电机的体积和成本;其次,连线众多的位置传感器会降低电机运行的可靠性,即便是现在应用最为广泛的霍尔传感器,也存在一定程度的磁不敏感区;再次,在某些恶劣的工作环境中,如在密封的空调压缩机中,由于制冷剂的强腐蚀性,常规的位置传感器根本就无法使用;此外,传感器的安装精度还会影响电机的运行性能,增加生产的工艺难度。
无刷直流电机的无位置传感器新运行方法-位置传感器的机械安装限制了BLDCM在较恶劣环境下的应用,增加了系统成本,降低了可靠性。因此无位置传感器技术已成为研究热点[1,2]。此外,BLDCM存在转矩脉动大的问题,大的转矩脉动会影响电机性能,产生振动噪声,损坏电机轴承,减小电机寿命。
