


PIC单片机RC振荡器的使用及校准方法-12C508A的复位矢量是程序的最高字0x1FF,这个字节生产商已经固定的烧写为MOVLW 0xXX,指令执行后,W寄存器中即为校准值XX,当我们需要校准时,那么,在紧接着的地址0x0应该是一条这样的指令:MOVWF OSCCAL。接下去RC振荡器就会以标准的振荡频率运行了。
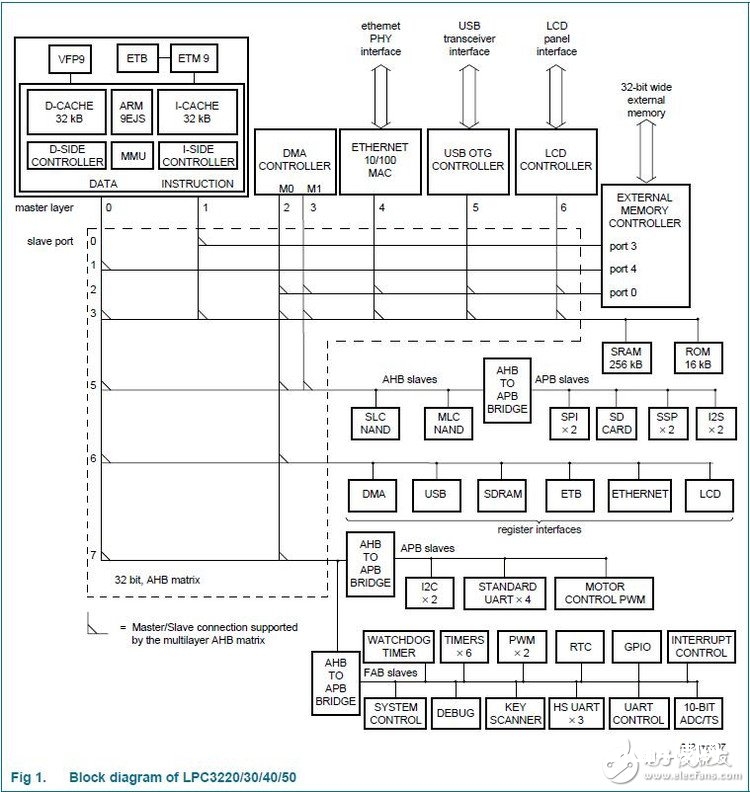
LPC3240的主要特点和功能概述-恩智浦公司的90nm工艺ARM926EJ-S核(包括矢量浮点联合处理器),以及大量的标准片上外围.CPU频率最高达到266Mhz。
依据3GPP标准和MIMO矢量信号分析测试需求,进行MIMO发射分集矢量信号分析测试仿真研究,着重针对发送模式TM2发送(TX)分集多天线建模和测试仿真,实现MIMO信号检测,进而分析MIMO发射分集

飞利浦电子公司日前宣布开始供应业界第一个ARM9核心的90纳米微控制器LPC3180。飞利浦这一全新的32位MCU不仅提供高效能和低功耗,也是唯一提供矢量浮
基于dsPIC30F6010芯片,采用全数字双闭环矢量法控制三相交流异步电动机,研究找出实现三相交流异步电机控制的实用方法。实验结果表明,电机起动快速、运行平稳,具有较宽的调速范围,精度较高,当测量转
摘要:基于MRAS的无速度传感器矢量控制法把模型参考自适应法与转速直接计算法结合了起来,设计了合适的自适应控制率,提高了转速估计的精确度,在此基础上,利用Matlab/Simulink构建MRAS无速
摘要 在电动汽车的研究当中,驱动电机及其控制系统设计尤为重要,文中基于英飞凌公司的16位微控制器芯片XC2267,设计了电动汽车用永磁同步电机磁场定向矢量控制系统。对控制系统部分硬件电路进行了设计,
摘要:为了响应绿色环保,节约能耗,降低噪音,直流变频调速发展越来越普及,调速的性能也不断地提高。矢量控制理论经过几十年的发展,技术也比较成熟。为此东芝开发了基于ARM Cortex—M3

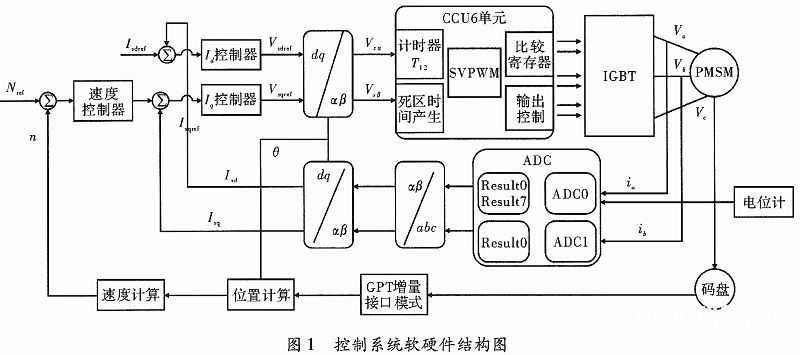
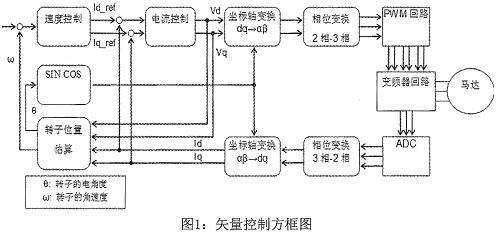
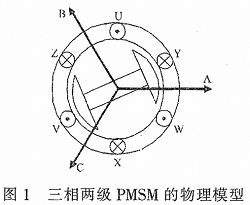
永磁同步电动机(PMSM)具有体积小、重量轻、结构多样、可靠性高等优点。在数控机床、工业机器人等自动化领域得到了广泛的应用。数字化交流伺服调速系统采用的是目前非常流行的矢量控制算法,即电压空间矢量脉宽
摘要:空间矢量脉宽调制算法是电压型逆变器控制方面的研究热点,广泛应用于三相电力系统中。基于硬件的FPGA/CPLD芯片能满足该算法对处理速度、实时性、可靠性较高的要求,本文利用Verilog HDL
