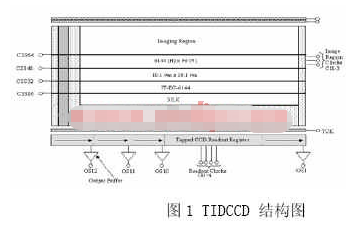
基于可编程逻辑器件实现TDICCD驱动时序发生器的设计-时间延时积分电荷耦合器件 (Time Delay and Integration Charge Coupled Devices) (TDICCD)是近几年发展起来的一种新型光电传感器。主要应用在低照度条件下,对低照度目标有很高的灵敏度。TDICCD通过多级积分来延长积分时间,从而提高器件的灵敏度和信噪比。
一种采用像素积分单元阵列结构的FPGA实现与性能分析-Adaboost 算法是Freund 和Schapire 于1995 年提出的,全称为Adaptive Boosting。它是 Boosting 算法的改进,意为该算法通过机器训练与学习不断自适应地调整假设的错误率,这 种灵活性使得Adaboost 算法很容易与实际应用联系起来。2001 年,微软研究院的P.Viola 提出了基于Haar 特征的Adaboost 算法,创造性地将积分图的概念引入到人脸检测的特征 计算当中,由于此算法使用了大量尺寸不一的矩形作用来表征人脸。并且该算法中用以检测 人脸的分类器是采用的级联结构,按照由弱到强的顺序组织的,其优点在于按照统计概率, 在图像检测的一开始就能够将大部分不包含人脸的区域排除在外,省去了后面计算负载更重 的检测步骤,以此达到检测速度提升的目的。经过实际测试,P3 700MHz 的处理器对352*288 的图像进行检测的速度为15 帧/秒。但是如果在嵌入式平台上运行的话

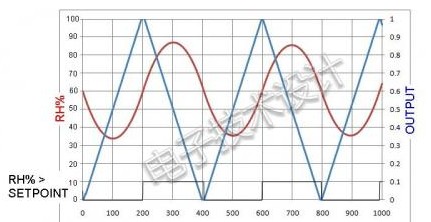
基于使用Bang-Bang传感器和纯积分反馈引起的系统不稳定说明-尽管PID获得了广泛而成功的应用,但它也有自己的局限性。PID控制器的一个特殊问题是与单比特(即“高/低”或“Bang-Bang”)反馈传感器的配合。这样的传感器给PID造成了麻烦,因为它们的输出既不包含PID的比例(P)、也不包括微分(D)信息,只留下用于提取控制信号的积分(I)。遗憾的是,纯积分在受控变量中存在严重的稳定性问题。
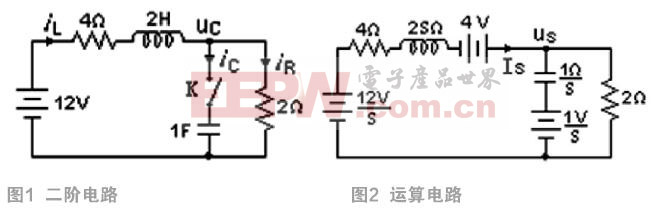
为了准确直观地观测电路的动态变化过程,采用四种方法对一电路实例进行仿真分析:用积分法求解状态方程,用拉普拉斯变换法求解s域的方程组,用数值积分函数求微分方程的数值解,构建微分方程的Simulink模型
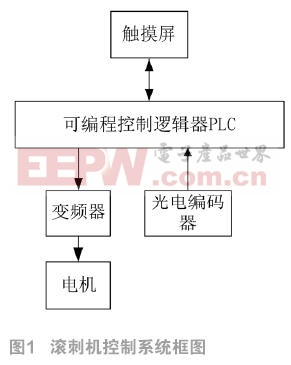
针对滚刺机的启动要求时间短、惯性大,同时电机快速启动易产生较大超调量的问题,对控制系统的结构进行了分析,并详细分析了交流异步电动机的转动特性,根据引入积分环节对滚刺机控制系统的影响,设计了变速积分PI
反相微分运算电路微分是积分的逆运算。将积分运算电路中R1和C的位置互换,可组成基本微分运算电路(图3.8a.6)。由运算放大器构成的微分运算电路的基本运算关系是微分运算电路可以实现波形变换,例如将矩形