


 3D霍尔效应传感器在自治体系中怎样完成精准的实时方位操控"/>
3D霍尔效应传感器在自治体系中怎样完成精准的实时方位操控"/>
 3D霍尔效应传感器在自治体系中怎样完成精准的实时方位操控
3D霍尔效应传感器在自治体系中怎样完成精准的实时方位操控3D霍尔效应传感器在自治系统中怎么实现精准的实时位置控制-Other Parts Discussed in Post: TMAG5170随着工业4.0的先进制造工艺席卷全球市场,高度自动化系统的需求急剧增长,这些系统既需要在集成的制造流程中运行,又需要不断收集流程控制数据。大多数此类系统(包括机械臂中的磁性编码器、接近传感器、传动器、压力变送器、线性电机和自主移动机器人)均需要先进的位置感应解决方案来控制性能并收集工厂级数据,从而做出更明智的决策并提高设备运行的安全性和可靠性。
图1中所示自主移动机器人可以自动执行简单的任务,例如在仓库内运输物料。这类工业机器人可帮助优化制造流程、增加生产量并提高生产率。要在工厂车间或仓库实现安全高效导航,自主移动机器人的轮子必须内置位置感应和速度控制等高精度系统控制功能。
图 1:自主移动机器人横穿仓库
可控制运动的高性能自动化系统几乎都需
近来,精密的电池供电型电子系统和自供电设备,在现有自主手持设备领域延伸出一些不同的应用。CMOS 处理技术和电路技术方面取得的巨大进步,降低了电路的功耗,使得新型自主供电系统成为可能。这些进步带来大量


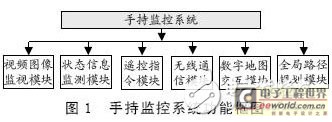
引言目前,便携式移动机器人全自主控制方式尚不成熟,其监控系统普遍采用人在环半自主控制方式设计。为满足携带、系统小型化、嵌进式的结构特点,故设计便携式移动机器人手持监控系统,并将其用于履带结构便携式移.

的AMT,其中AMT控制器采用了自主研发基于CAN的车载网络,AMT通过车载网络与车上的其他零部件进行信息交互。网络在新能源汽车和传统汽车上的成功应用,标志着自主研发的车载网络已深入到汽车控制的核心—
为了满足人们日益发展的视办检测需求,使用SPCE3200微控制芯片,外部扩展TFT-LCD模块和键盘输入模块,设计出一种基于测试人员自主检测的视力检测系统。该系统的设计旨在为视力的自主
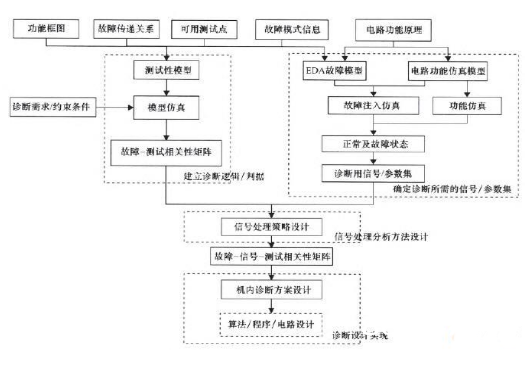
为及时、准确地检测隔离内部故障,支持新一代飞机视情维修和自主式保障的实现,提高飞机的保障性和经济可承受性,必须在装备研制一开始就综合考虑整体诊断策略的设计,从设计的源头保证良好的测试性。因此,在设
