



总线舵机是什么?基于STM32的单线串口通信-总线伺服舵机即串行总线智能舵机,实际上可以理解为数字舵机的衍生品,数字舵机与模拟舵机相比而言是控制系统设计上的颠覆,而总线伺服舵机对于舵机而言则是在功能和运用上的颠覆。舵机的运用方式实际上只能发挥出总线伺服舵机非常小的一部分功能。

舵机DS3115的组成和工作原理介绍-一般来讲,舵机主要由以下几个部分组成, 舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。 工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲),控制电机 转动 ,电机带动一系列齿轮组,减速后传动至输出舵盘。
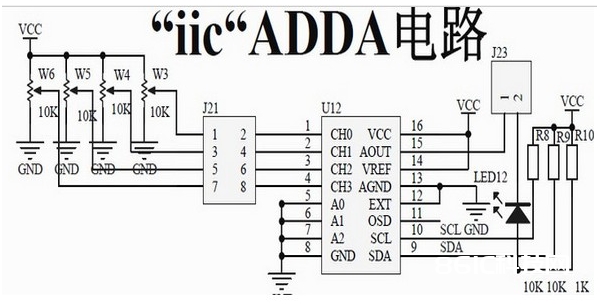
51单片机控制舵机旋转的设计-#include“reg52.h”
#include //包含NOP空指令函数_nop_();
#define AddWr 0x90 //写数据地址
#define AddRd 0x91 //读数据地址
sbit Sda=P1^2; //定义总线连接端口
sbit Scl=P1^1;
sbit control_signal=P1^5;
data unsigned int Display[8];//定义临时存放数码管数值
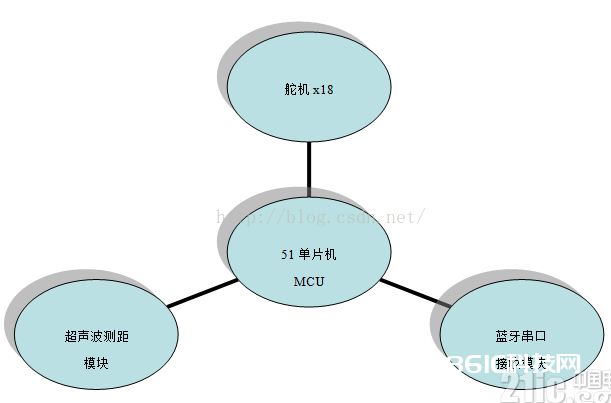
51单片机对六足机器人的控制设计-控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。舵机的控制信号周期为20MS的脉宽调制(PWM)信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0-180度,呈线性变化。


电动舵机作为导弹飞行的执行机构,其体积重量的减少有利于导弹性能的提升。为了减小体积重量和节约成本,电动舵机采用三相无刷直流电机+滚珠丝杠直连式结构,采用一个控制器来控制四路舵机。介绍了控制器的硬件结构
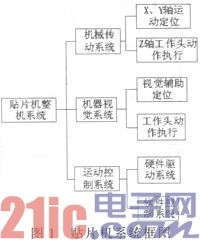
摘要:本文采用STM32F103RBT6芯片设计并实现了一款小型化桌面型的贴片机。首先介绍了贴片机的结构及各个模块的组成,分析了其中运动控制系统模块的硬件组成、软件设计方案,对核心电路部分、舵机的驱动
摘要:在无人机半物理仿真实验中,为了节约实验成本,提出用模拟舵机系统代替真实舵机的方法。基于VC++设计了模拟舵机系统。在半物理仿真系统中连入模拟舵机,并用该系统模拟副翼、升降舵、油门的舵机。通过实验

摘要:针对在舵机、导引头、惯导等弹上设备日益数字化的趋势下飞控系统的需求,提出了一种基于DSP+FPGA结构的通用飞控计算机平台。DSP+FPGA结构能发挥两种处理芯片各自的优势,而且具有良好的通用性
