



***********************************************Thisisourcontrolofthesteeringgear(舵机)Nextwewilluseit

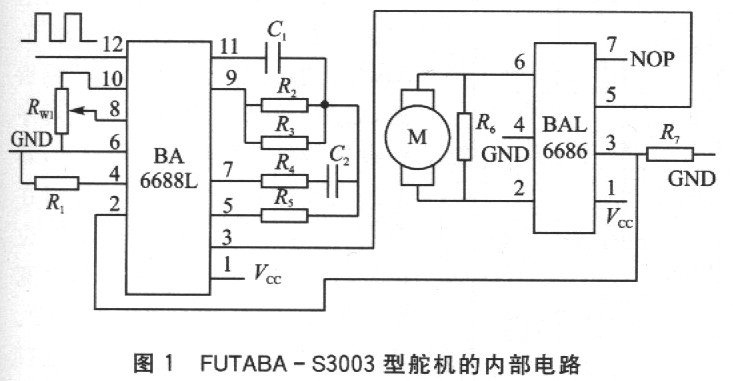
舵机是一种位置伺服的驱动器。它接收一定的控制信号,输出一定的角度,适用于那些需要角度不断变化并可以保持的控制系统。在微机电系统和航模中,它是一个基本的输出执行机构。以FUTABA-S3003型舵机
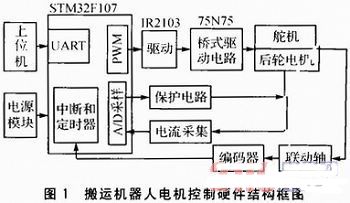
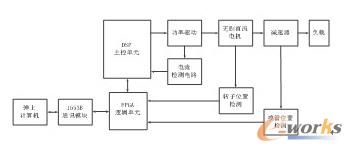
针对搬运机器人的前轮转向舵机和后轮驱动电机的控制要求,采用以Cortex-M3为内核的STM32F107作为主控制器,采用嵌入实时操作系统μC/OS-II,将程序分成启动任务、电机转速控制任务、舵机控

针对市场上的平衡车售价过高,功能单一,失去平衡后不能自动恢复平衡的问题,提出了基于STM32的平衡车,它采用实时操作系统uCOS-II,借助陀螺仪、加速计、舵机控制器、编码器构成一个自平衡系统。此系统

设计了一种光强自动调节系统。通过光电传感电路实现光电信号的转换,使用FPGA对数据进行实时处理,并以实验环境光照强度测试结果为参照对所测光强进行线性变换修正,进而查表获得舵机偏转角度的控制量,通过改变
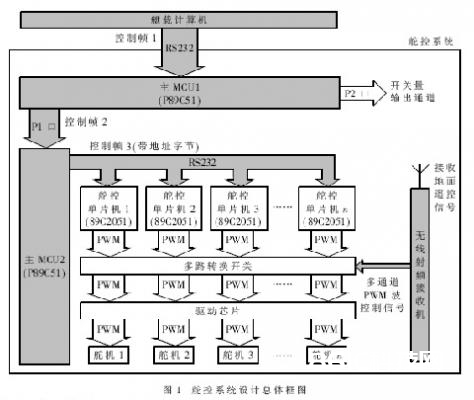
以单片机为核心设计并实现了小型自控飞艇的舵机控制系统,对系统的硬件设计进行了说明,对软件设计中的关键问题mdash;mdash;串行通讯及帧识别、多单片机通讯及PWM波的软件产生方法进行了详细阐述。

智能硬件电子电路设计图集锦TOP7 —电路图天天读(158)-包含了智能电动平衡车电路、采用MSP430的机器人定位系统电路、多路舵机控制电路等智能硬件电路设计,以供读者品读。
