


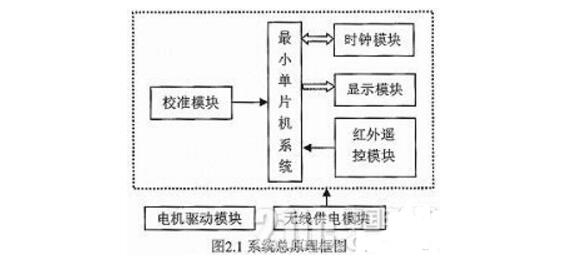
基于单片机旋转时钟的总体设计及方案-本文主要设计了一个基于单片机的电子旋转时钟。该设计主要依据人眼视觉暂留原理,使用电机带动一定数量的发光二极管旋转,让单片机控制发光二极管在相应的位置点亮,只要点亮时间间隔小于人眼视觉暂留时间,就算不是同时点亮的,也能完整的呈现出一个模拟时钟。
关于机器视觉的一些事-机器视觉系统利用机器代替人眼来做测量和判断,通过机器视觉产品将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
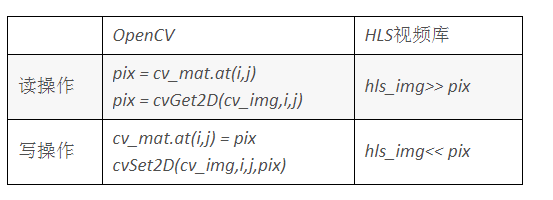
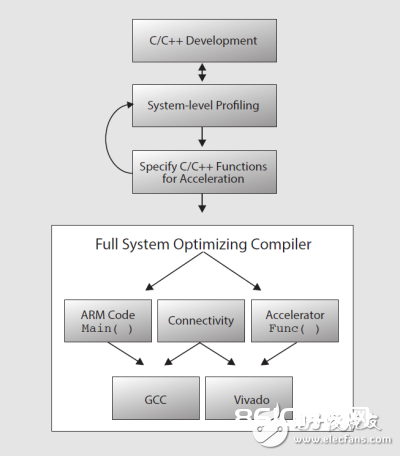
Vivado设计流程分析 Vivado HLS实现OpenCV的开发流程-作者:Harvest Guo来源:Xilinx DSP Specilist 本文通过对OpenCV中图像类型和函数处理方法的介绍,通过设计实例描述在vivadoHLS中调用OpenCV库函数实现图像处理的几个基本步骤,完成从OpenCV设计到RTL转换综合的开发流程。 开源计算机视觉 (OpenCV) 被广泛用于开发计算机视觉应用,它包含2500多个优化的视频函数的函数库并且专门针对台式机处理器和GPU进行优化。OpenCV的用户成千上万,OpenCV的设计无需修改即可在 Zynq器件的ARM处理器上运行。但是利用OpenCV实现的高清

视觉导向的机器人和无人机可编程SoC设计-视觉导向的机器人和无人机因此不仅需要强大的处理能力,还需要有能力进行功耗优化,提供面向未来且具有可扩展性的解决方案。
基于模糊控制和QR码的精确定位方法设计详解-自动引导车(Automated Guided Vehicle,AGV)是现代物流行业的高效运输工具。但是,在AGV运行过程中,导航定位精度差,一直制约其在许多工业环境下的应用。提出一种最优偏差路径的AGV纠偏方法,可以实现5 mm范围内纠正,但是系统鲁棒性较差。采用了一种基于惯性导航和视觉里程计的定位算法,实现视觉辅助定位,克服惯性导航的不足,但是仍然无法实现后期AGV的位置修正;采用自定义定位标识符法,在地面铺设停车标识,系统识别停车标志符后,即根据直线运动公式计算AGV停车距离,直至距离为0,但后期缺少视觉信息反馈,不具备停车纠偏能力。

工业机器视觉在其他领域的应用-工业机器视觉是一项综合技术,其中包括数字图像处理技术、机械工程技术、控制技术、电光源照 明技术,光学成像技术、传感器技术、模拟与数字视频技术、计算机软硬件技术、人机接口技术等。这些技术在机器视觉中是并列关系,相互协调应用才能构成一个成功的工业机器视觉应用系统。
SDSoC开发环境给开发机器视觉系统提供的优势-开发机器视觉系统通常需要大量的时间来设计能执行所有重要图像采集及处理功能的电子产品。通常需要两年多的时间,这会给摄像机及系统制造商的上市进程与产品规划带来不利影响。
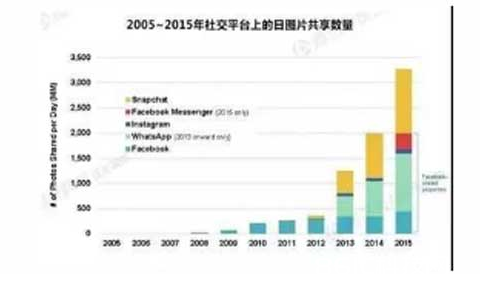
为了发挥FPGA硬件实现的速度优势 算法进行优化是必须要做的-“No PP,No WAY”这是个眼见为实的世界,这是个视觉构成的信息洪流的世界。大脑处理视觉内容的速度比文字内容快6万倍,而随着智能手机的普及,图片、视频的产生和分享已经是人们在社交平台上的基本交流方式。用户通过手机、平板、电脑上传和分享自己的图片,而且这个趋势是每年都在增长(参见图1)。
机器视觉和智能图像处理技术之间的关系-机器视觉(Machine Vision)是人工智能领域中发展迅速的一个重要分支,目前正处于不断突破、走向成熟的阶段。一般认为机器视觉“是通过光学装置和非接触传感器自动地接受和处理一个真实场景的图像,通过分析图像获得所需信息或用于控制机器运动的装置”,可以看出智能图像处理技术在机器视觉中占有举足轻重的位置。

全可编程技术将推动嵌入式视觉的革命-嵌入式视觉技术可实时在各种光线条件下从影像中快速撷取情报,帮助机器“看见”。其实,你每天都随时携带着一个嵌入式视觉系统——智能手机。智能手机中的智能设备不仅能够捕获图像和录制视频,而且还能执行增强现实的应用,这些都展示了嵌入式视觉技术是如何被普遍地广为接受。
