


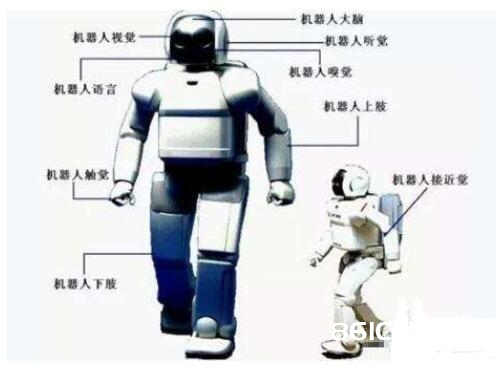
本站为您提供的机器人传感器常用的有哪几种,机器人常用传感器根据检测对象的不同可分为内部传感器和外部传感器。内部传感器主要用来检测机器人本身状态(如手臂间角度),多为检测位置和角度的传感器。外部传感器主要用来检测机器人所处环境(如是什么物体,离物体的距离有多远等)及状况(如抓取的物体是否滑落)的传感器。具体有物体识别传感器、物体探伤传感器、接近觉传感器、距离传感器、力觉传感器,听觉传感器等。

本站为您提供的水平传感器工作原理_水平传感器应用范围,水平传感器是通过测量静态重力加速度变化,转换成倾角变化。测量的倾斜角度可以在液晶上显示为角度。通常产品内置有温度补偿,消除由于温度造成的零位角度漂移。
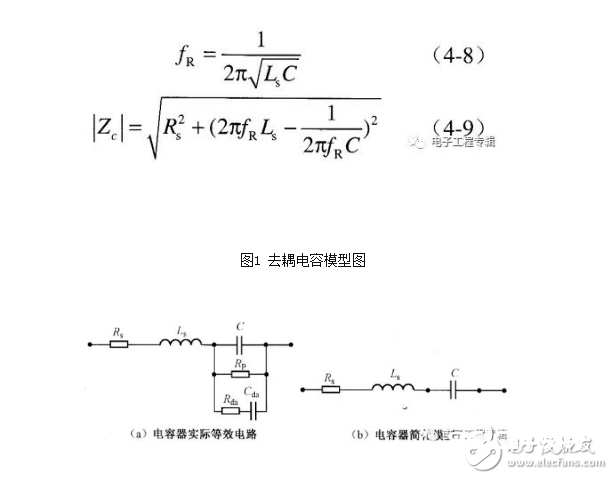
本站为您提供的去耦电容的作用和原理,对于电容退耦,很多资料中都有涉及,但是阐述的角度不同。有些是从局部电荷存储(即 储能)的角度来说明,有些是从电源分配系统的阻抗的角度来说明,还有些资料的说明更 为混乱,一会提储能,一会提阻抗,因此很多人在看资料的时候感到有些迷惑。其实,这两种提法,本质上是相同的,只不过看待问题的视角不同而已。
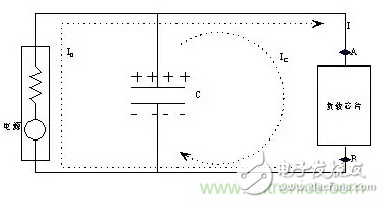
本站为您提供的从储能、阻抗两种不同视角解析电容去耦原理,对于电容退耦,很多资料中都有涉及,但是阐述的角度不同。有些是从局部电荷存储(即储能)的角度来说明,有些是从电源分配系统的阻抗的角度来说明,还有些资料的说明更为混乱,一会提储能,一会提阻抗,因此很多人在看资料的时候感到有些迷惑。其实,这两种提法,本质上是相同的,只不过看待问题的视角不同而已。为了让大家有个清楚的认识,本文分别介绍一下这两种解释。

